

")
 |  |
Общие сведения:
Trema модуль - Энкодер, потенциометр, I2C-flash - является устройством ввода данных с подключением по шине I2С. У модуля есть программируемый выход, значительно расширяющий его возможности.
Модуль способен работать как энкодер (отправляя количество тактов поворота вала в одну и другую сторону), как потенциометр (отправляя точное положение вала относительно точки сброса), как тактовая кнопка (отправляя события и состояния кнопки, в т.ч. и время её удержания), а так же модуль способен работать автономно (управляя сигналом на выходе без подключения к шине I2C).
Модуль относится к серии «Flash», а значит к одной шине I2C можно подключить более 100 модулей, так как их адрес на шине I2C (по умолчанию 0x09), хранящийся в энергонезависимой памяти, можно менять программно.
Модуль можно использовать в любых проектах где требуется тактовая кнопка, потенциометр или энкодер, а так же в тех проектах где требуется диммирование устройств без участия других микроконтроллеров.
Видео:
Спецификация:
- Напряжение питания: 3,3 В или 5 В (постоянного тока).
- Потребляемый ток: до 10 мА (без нагрузки на программируемом выходе).
- Интерфейс: I2C.
- Скорость шины I2C: 100 кбит/с.
- Адрес на шине I2C: устанавливается программно (по умолчанию 0x09).
- Уровень логической 1 на линиях шины I2C: 3,3 В (толерантны к 5 В).
- Уровень логической 1 на выходе Signal: 3,3 В.
- Аналоговый уровень на выходе Signal: от 0 до 3,3 В.
- Разрешение ШИМ: 8 бит.
- Разрешение ЦАП: 8 бит (ШИМ + RC-фильтр).
- Частота ШИМ: устанавливается программно от 1 до 12000 Гц (по умолчанию 1,5 кГц).
- Рабочая температура: от -20 до +70 °С.
- Габариты: 30 х 30 мм.
- Вес: 12 г.
Все модули линейки "Trema" выполнены в одном формате

У модуля имеются две колодки выводов: разъём I2C (GND, Vcc, SDA, SCL) и разъём D/A (GND, Vcc, Signal).
- SCL - вход/выход линии тактирования шины I2C.
- SDA - вход/выход линии данных шины I2C.
- Vcc - вход питания 3,3 или 5 В.
- GND - общий вывод питания.
- Signal - программируемый выход модуля.
Модуль подключается к Arduino по шине I2C.
Устройства которыми модуль управляет в автономном режиме, подключаются к колодке D/A.
Подключение:
По умолчанию все модули FLASH-I2C имеют установленный адрес 0х09.
— Перед подключением 1 модуля к шине I2C настоятельно рекомендуется изменить адрес модуля.
— При подключении 2 и более FLASH-I2C модулей к шине необходимо в обязательном порядке предварительно изменить адрес каждого модуля, после чего уже подключать их к шине.
Более подробно о том, как это сделать, а так же о многом другом, что касается работы FLASH-I2C модулей, вы можете прочесть в этой статье.
Модуль подключается к шине I2C.
Для удобства подключения, предлагаем воспользоваться Trema+Expander Hat.
Модуль удобно подключать 2 способами, в зависимости от ситуации:
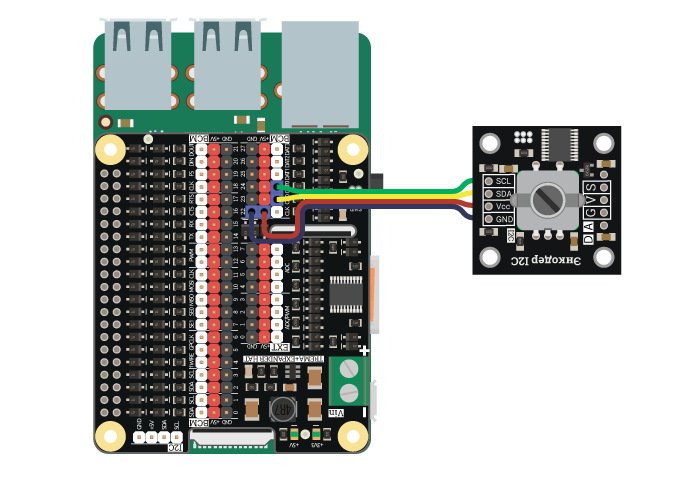
Способ - 1: Используя провода и Raspberry Pi
Используя провода «Мама — Мама», подключаем напрямую к Raspberry Pi, согласно следующей таблице:
| Вывод модуля | Вывод Raspberry |
|---|---|
| Vcc | 3.3V |
| GND | GND |
| SDA | GPIO 23 |
| SCL | GPIO 24 |
В этом случае необходимо питать модуль от 3,3 В Raspberry

Способ - 2: Используя Trema+Expander Hat
Подключаем к Trema+Expander Hat.
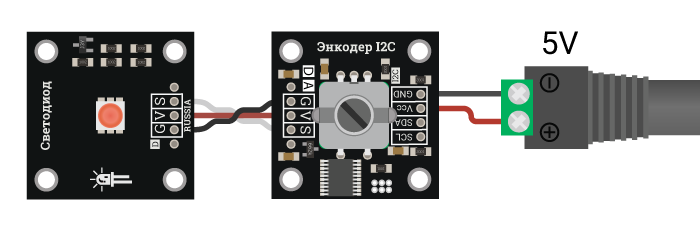
Подключение к колодке D/A:
Модуль может работать в автономном режиме, при этом необязательно подключать ведущее устройство к колодке I2C, достаточно подать питание на Vcc и GND, но, перед этим, модулю необходимо установить опцию работы вывода S при помощи ведущего устройства функцией PinMode( РЕЖИМ ). Опция будет сохранена в энергонезависимой памяти модуля.
Режимы PinMode:
ENC_PIN_MODE_KEY, ENC_PIN_MODE_TRG, ENC_PIN_MODE_PWM, ENC_PIN_MODE_PWM_LOG, ENC_PIN_MODE_DAC
Например, можно подключить модуль светодиод, модуль силовой ключ или драйвер светодиодной ленты.
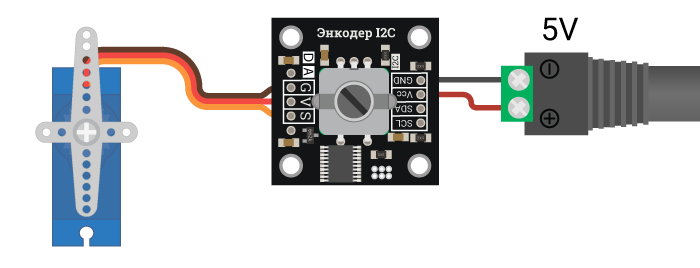
Режим PinMode(ENC_PIN_MODE_SER):
Режим ENC_PIN_MODE_SER сделан специально для работы с
сервоприводами.
Питание:
Входное напряжение питания модуля 3,3В или 5В постоянного тока, подаётся на выводы Vcc и GND любого разъёма.
Вывод «Vcc» колодки «I2C» электрически соединён с выводом «Vcc» колодки «D/A», равно как и вывод «GND» колодки «I2C» соединён с выводом «GND» колодки «D/A». Это позволяет подать питание на колодку «I2C», а питание для устройства которым управляет модуль взять с колодки «D/A» (Digital/Analog).
Подробнее о модуле:
Модуль построен на базе микроконтроллера STM32F030F4 и снабжен собственным стабилизатором напряжения. Модуль самостоятельно обрабатывает сигналы энкодера (и его тактовой кнопки). Отличием данного модуля является наличие вывода, который можно запрограммировать для работы в качестве выхода без дальнейшего подключения модуля к шине I2C (без подключения к внешнему микроконтроллеру). Вывод модуля может работать как выход кнопки энкодера, как выход кнопочного переключателя (триггер), как выход с ШИМ (для управления моторами), как выход с логарифмической ШИМ (для управления светодиодами), как выход управления сервоприводами и как аналоговый выход (имитация ЦАП) с напряжением от 0 до 3,3 В. Режим работы выхода сохраняется и после отключения питания. Значит вывод можно однократно запрограммировать и использовать модуль в проектах без подключения к шине I2C.
Модуль позволяет:
- Получать количество тактов поворота энкодера в одну и другую сторону.
- Получать состояние и события кнопки вала энкодера.
- Получать время удержания кнопки вала энкодера.
- Получать точное положение вала энкодера относительно точки сброса.
- Сбрасывать положение вала энкодера.
- Автономно работать управляя сигналом на выходе без подключения к шине I2C.
- Задавать количество оборотов вала энкодера, как для автономной работы, так и для определения его положения.
- Указывать частоту для сигнала ШИМ, если таковой формируется на выходе модуля.
Специально для работы с Trema модулем - Энкодер, потенциометр, I2C-flash силовых ключей и реле, нами разработана библиотека pyiArduinoI2Cencoder которая позволяет реализовать все функции модуля.
Подробнее об установке библиотек можно узнать в этой статье.
Примеры работы с модулем по шине I2C:
Для работы с модулем необходимо включить шину I2C.
Для подключения библиотеки необходимо сначала её установить. Сделать это можно в менеджере модулей в Thonny или в терминале Raspberry, в виртуальной среде, командой:
pip install pyiArduinoI2Cencoder
Смена адреса модуля на шине I2C:
# Подключаем библиотеку для работы с модульом температуры и влажности
from pyiArduinoI2Cencoder import *
import sys
# Объявляем объект module для работы с функциями и методами библиотеки pyiArduinoI2Cencoder.
# Если при объявлении объекта указать адрес, например, module(0x0B),
# то пример будет работать с тем модулем, адрес которого был указан.
module = pyiArduinoI2Cencoder(auto = NO_BEGIN, bus = "/dev/i2c-3")
# Если сценарию не были переданы аргументы
if len(sys.argv) < 2:
# Назначаем модулю адрес (0x07 < адрес < 0x7F).
newAddress = 0x09
# Иначе
else:
# Новый адрес - первый аргумент
newAddress = int(sys.argv[1])
# Если модуль найден
if module.begin():
print("Найден модуль %#.2x" % module.getAddress())
# Если адрес удалось изменить
if module.changeAddress(newAddress):
print("Адрес изменён на %#.2x" % module.getAddress())
else:
print("Адрес не изменён!")
else:
print("Модуль не найден!")
Для работы данного примера, на шине I2C должен быть только один модуль энкодера.
Данный сценарий демонстрирует не только возможность смены адреса на
указанный в переменной newAddress, но и обнаружение, и
вывод текущего адреса модуля на шине I2C.
Чтение разницы совершённых тактов поворота энкодера:
from time import sleep
# Подключаем библиотеку для работы с энкодером I2C-flash.
from pyiArduinoI2Cencoder import *
# Инстанцируем объект, указывая адрес модуля на шине I2C.
enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3")
print("Вращайте барабан!")
while True:
# Считываем такты поворота энкодера:
turn = enc.getEncoder(ENC_TURN)
# Выводим считанные данные:
if turn is not 0:
print(turn)
# Без задержки в stdout будут появляться только ±1.
sleep(.1)
После загрузки данного примера, в stdout последовательного порта будут появляться числа: Определяющие разницу совершённых тактов поворота энкодера.
Один полный оборот энкодера состоит из 20 тактов.
Например: Если с момента появления предыдущего числа в stdout, повернуть энкодер на 5 тактов против часовой стрелки, то в stdout будет отправлено следующее число равное -5. Если с момента появления предыдущего числа в stdout, повернуть энкодер на 2 такта против часовой стрелки и 5 тактов по часовой, то в stdout будет отправлено следующее число равное 3.
Чтение количества совершённых тактов поворота энкодера:
from time import sleep
# Подключаем библиотеку для работы с энкодером I2C-flash.
from pyiArduinoI2Cencoder import *
# Инстанцируем объект, указывая адрес модуля на шине I2C.
enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3")
print("Вращайте барабан!")
while True:
# Определяем переменные для чтения количества тактов поворота энкодера.
turnL, turnR = 0, 0
# Считываем такты поворота энкодера:
turnL=enc.getEncoder(ENC_TURN_LEFT) # Считываем количество влево
turnR=enc.getEncoder(ENC_TURN_RIGHT) # Считываем количество вправо
# Выводим считанные данные:
if turnL:
print("-",
turnL)
if turnR:
print("+",
turnR)
sleep(.1)
После загрузки данного примера, в stdout последовательного порта, десять раз в секунду, будут появляться по два числа, определяющие не разницу, а общее количество совершённых тактов поворота энкодера, против часовой стрелки (отрицательные числа), и по часовой стрелке (положительные числа).
Один полный оборот энкодера состоит из 20 тактов.
Например: Если с момента появления предыдущего числа в stdout, повернуть энкодер на 2 такта против часовой стрелки и 5 тактов по часовой, то в stdout будут отправлены следующие два числа равные -2 и 5.
Чтение текущей позиции вала энкодера:
from time import sleep
# Подключаем библиотеку для работы с энкодером I2C-flash.
from pyiArduinoI2Cencoder import *
# Инстанцируем объект, указывая адрес модуля на шине I2C.
enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3")
# Указываем считать до 2 полных оборотов.
enc.setPosSettings(2)
print("Вращайте вал!")
while True:
p = enc.getPosition()
# Выводим текущую позицию вала энкодера.
print(p)
sleep(.5)
После загрузки данного примера, в stdout будут появляться числа, точно определяющие текущую позицию вала энкодера.
Функцией setPosSettings() было определено считать до 5
полных оборотов, один оборот состоит из 20 тактов, значит в stdout будут
отправляться числа от 0 до 100, точно определяющие положение вала
энкодера. При вращении энкодера по часовой стрелке, числа будут
увеличиваться (но не смогут стать больше 100), а против часовой стрелки,
уменьшаться (но не смогут стать меньше 0). Если вызвать функцию
setPosSettings() указав в качестве второго параметра
True, то счет будет вестись не от 0 до 100, а от 0 до ±100
(в зависимости от направления поворота вала энкодера).
Данный пример похож на работу с потенциометром, где зная значение можно точно определить положение ручки потенциометра.
Функция resPosition() вызванная в коде
Setup() данного примера, ничего не делает, так как
положение вала энкодера при подаче питания и так считается нулевым. Но
эту функцию можно вызвать в любой части сценария, где требуется текущее
положение принять за 0.
Реакция на события кнопки вала энкодера:
from time import sleep
# Подключаем библиотеку для работы с энкодером I2C-flash.
from pyiArduinoI2Cencoder import *
# Инстанцируем объект, указывая адрес модуля на шине I2C.
enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3")
# Указываем считать до 2 полных оборотов.
enc.setPosSettings(2)
while True:
if enc.getButton(KEY_PUSHED):
print("Нажали")
if enc.getButton(KEY_RELEASED):
print("Отпустили")
sleep(.1)
Данный пример демонстрирует работу с событиями кнопки вала энкодера. При нажатии на вал в stdout однократно появится надпись "Нажали", а при отпускании вала, в stdout появится надпись "Отпустили", так же однократно.
Реакция на состояние удержания кнопки энкодера:
from time import sleep
# Подключаем библиотеку для работы с энкодером I2C-flash.
from pyiArduinoI2Cencoder import *
# Инстанцируем объект, указывая адрес модуля на шине I2C.
enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3")
print("Удерживайте вал нажатым")
while True:
# Считываем время удержания кнопки (в миллисекундах)
# Максимально фиксируемое время удержания: 25,5 секунд.
t = enc.getButton(KEY_TIME_PRESSED)
if t > 5000:
print("Удерживается")
sleep(.1)
Данный пример демонстрирует работу с одним из состояний кнопки вала энкодера. Если нажать на вал и удерживать его в нажатом состоянии, то через 5 секунд в stdout последовательного порта начнут появляться надписи "Удерживается", пока не отпустить вал.
Инверсия поворота вала энкодера:
from time import sleep # Подключаем библиотеку для работы с энкодером I2C-flash. from pyiArduinoI2Cencoder import * # Инстанцируем объект, указывая адрес модуля на шине I2C. enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3") # Устанавливаем флаг инверсии поворота. enc.invEncoder(True)
После загрузки этого сценария, модуль станет воспринимать поворот
вала энкодера наоборот. Поворот энкодера влево будет восприниматься как
поворот энкодера в право, а поворот вправо как поворот влево. Флаг
инверсии направления поворота заданный функцией
invEncoder() сохраняется в энергонезависимой памяти модуля.
Это значит что для восстановления правильной работы энкодера не
достаточно просто отключить питание, а требуется загрузить сценарий в
котором выполняется однократное обращение к функции
invEncoder() с параметром False.
Инверсия поворота вала энкодера влияет не только на те параметры которые можно прочитать по шине I2C, но и на поведение выхода модуля в автономном режиме работы.
Примеры автономной работы модуля:
В данном разделе раскрывается возможность программирования выхода модуля. После того как выход запрограммирован на требуемый режим работы, модуль может работать автономно (без подключения к шине I2C). Выбранный режим работы выхода сохраняется в энергонезависимую память модуля, значит вывод продолжит работать в указанном режиме даже после отключения и подачи питания на модуль.
Настройка вывода модуля на работу выхода с ШИМ:
# Подключаем библиотеку для работы с энкодером I2C-flash. from pyiArduinoI2Cencoder import * # Инстанцируем объект, указывая адрес модуля на шине I2C. enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3") # Инициируем работу с энкодером. enc.begin() # Инициируем работу с энкодером. # Указываем выводу модуля работать как выход с ШИМ, # коэффициент заполнения которого меняется от 0% до 100% # за 2 полных оборота вала энкодера. enc.setPinOut(ENC_PIN_MODE_PWM, 2)
В данном примере вывод модуля программируется в режим работы выхода с ШИМ, работающем на частоте 5 кГц, а его коэффициент заполнения меняется от 0 до 100%, за 2 полных оборота вала энкодера.
Режим работы вывода задаётся функцией setPinOut().
Первый параметр функции задаёт режим работы, второй указывает количество
полных оборотов за которое коэффициент заполнения ШИМ на выходе модуля
изменится с 0 до 100%, а третий параметр указывает частоту ШИМ на выходе
модуля от 1 до 12000 Гц. Обязательным является только первый
параметр.
Все параметры указанные в функции setPinOut(),
сохраняются в энергонезависимую память энкодера, значения отсутствующих
параметров берутся из памяти.
Теперь если подать питание на модуль (даже не подключая его к шине I2C), на выходе модуля появится сигнал ШИМ, коэффициент заполнения которого будет увеличиваться при повороте вала энкодера по часовой стрелке, и уменьшаться при повороте против часовой стрелки. Вывод будет работать даже после отключения и подачи питания.
В данном примере используется ШИМ, коэффициент заполнения которого
имеет линейную зависимость от поворота вала энкодера. Если Вы желаете
использовать выход модуля для управления яркостью осветительных приборов
или громкостью звуковых, то в качестве первого аргумента функции
setPinOut() лучше указать
ENC_PIN_MODE_PWM_LOG, этот режим ШИМ отличается
логарифмической зависимостью от поворота вала энкодера.
Настройка вывода модуля на работу в качестве аналогового выхода:
# Подключаем библиотеку для работы с энкодером I2C-flash. from pyiArduinoI2Cencoder import * # Инстанцируем объект, указывая адрес модуля на шине I2C. enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3") # Инициируем работу с энкодером. enc.begin() # Указываем выводу модуля работать как аналоговый выход, # напряжение которого меняется от 0 до 3.3В # за 2 полных оборота вала энкодера. enc.setPinOut(ENC_PIN_MODE_DAC, 2)
Данный пример похож на предыдущий, но выход модуля программируется не на работу в режиме выхода с ШИМ, а на работу в качестве аналогового выхода, напряжение которого меняется с минимального (0В) до максимального (3,3В) за 3 полных оборота вала энкодера.
В данном примере, функцию setPinOut() по прежнему можно
вызвать с тремя параметрами (указав частоту ШИМ), так как аналоговый
сигнал получается прохождением сигнала ШИМ через сглаживающий RC-фильтр
модуля. Если частота ШИМ не указана (как в примере), то будет
использована частота сохранённая ранее в энергонезависимую память
энкодера.
Настройка вывода модуля на работу с сервоприводами:
# Подключаем библиотеку для работы с энкодером I2C-flash. from pyiArduinoI2Cencoder import * # Инстанцируем объект, указывая адрес модуля на шине I2C. enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3") # Инициируем работу с энкодером. enc.begin() # Задаём границы поворота сервопривода, указав ширину # импульсов в мкс для минимального и максимального угла. enc.setServoLimit(450, 2450) # Указываем выводу модуля работать как выход управления сервоприводом, enc.setPinOut(ENC_PIN_MODE_SER, 2)
Данный пример программирует вывод модуля на работу с сервоприводом, угол поворота которого меняется от минимального до максимального за 5 полных оборотов вала энкодера.
В данном примере, функции setPinOut() нельзя указать
частоту ШИМ, так как управление сервоприводами осуществляется на частоте
50 Гц, эта частота не сохраняется в память модуля.
Функцией setServoLimit() (если её раскомментировать)
можно определить границы поворота вала сервопривода, задав минимальную и
максимальную ширину импульсов в мкс. Эти значения сохранятся в
энергонезависимую память модуля. Для большинства сервоприводов полный
ход вала определён границами от 450 до 2450 мкс.
Установка ограничений поворота вала сервопривода:
Из предыдущего примера стало ясно что функцией
setServoLimit() можно ограничить угол вращения вала
сервопривода, но данная функция принимает не углы в градусах, а ширину
импульсов в микросекундах, так как разные сервоприводы рассчитаны на
разные углы.
Следующий пример позволяет ограничить диапазон вращения вала сервопривода, даже если Вам не известны ни значения углов, ни ширина импульсов им соответствующая.
from time import sleep
from pyiArduinoI2Cencoder import *
enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3")
txt1 = "Поворотом ручки энкодера добейтесь требуемого\r\nкрайнего положения вала сервопривода.\r\nНажмите на ручку энкодера..."
txt2 = "Поворотом ручки энкодера добейтесь другого\r\nкрайнего положения вала сервопривода.\r\nНажмите на ручку энкодера..."
# Определяем ширину импульсов для крайних
# положений вала сервопривода в мкс.
i, j =450, 2450
# Указываем выводу модуля работать с сервоприводом,
# отведя под управление 2 полных оборота вала энкодера.
enc.setPinOut(ENC_PIN_MODE_SER, 2)
# Задаём границы поворота сервопривода, указав ширину
# импульсов в мкс для минимального и максимального угла.
enc.setServoLimit(i, j)
# Выводим текст информирующий о действиях которые необходимо выполнить.
print(txt1)
# Бесконечно ждём нажатия кнопки энкодера ...
while enc.getButton(KEY_PUSHED) == False:
sleep(.1)
# Получаем ширину импульсов текущего положения вала сервопривода.
i = enc.getServoWidth()
print("Ок." )
# Бесконечно ждём отпускания кнопки энкодера ...
while enc.getButton(KEY_RELEASED) == False:
sleep(.1)
# Выводим текст информирующий о действиях которые необходимо выполнить.
print(txt2)
# Бесконечно ждём нажатия кнопки энкодера ...
while enc.getButton(KEY_PUSHED) == False :
sleep(.1)
# Получаем ширину импульсов текущего положения вала сервопривода.
j = enc.getServoWidth()
print("Ок." )
# Бесконечно ждём отпускания кнопки энкодера ...
while enc.getButton(KEY_RELEASED) == False:
sleep(.1)
# Задаём новые границы поворота сервопривода, указав ширину импульсов
# в мкс для минимального и максимального угла.
enc.setServoLimit(i, j)
print("Калибровка завершена!")
Данный сценарий можно выполнить однократно, так как значения ширины
импульсов (в мкс.) указываемые функцией setServoLimit() и
режим работы выхода задаваемый функцией setPinOut()
сохраняются в энергонезависимой памяти модуля.
Настройка вывода модуля на работу в качестве выхода кнопки:
# Подключаем библиотеку для работы с энкодером I2C-flash. from pyiArduinoI2Cencoder import * # Инстанцируем объект, указывая адрес модуля на шине I2C. enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3") # Инициируем работу с энкодером. enc.begin() # Указываем выводу модуля работать как выход кнопки энкодера. enc.setPinOut(ENC_PIN_MODE_KEY)
Данный пример программирует вывод модуля на работу в качестве выхода кнопки. При нажатии на вал энкодера на выходе установится уровень логической 1, а при отпускании вала энкодера, уровень логического 0.
Отключение вывода модуля:
# Подключаем библиотеку для работы с энкодером I2C-flash. from pyiArduinoI2Cencoder import * # Инстанцируем объект, указывая адрес модуля на шине I2C. enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3") # Инициируем работу с энкодером. enc.begin() # Указываем выводу модуля не работать. enc.setPinOut(ENC_PIN_MODE_KEY)
Данный пример программирует выход на отключение. Выход переходит в режим высокого импеданса и на него не подаются сигналы модуля.
Описание функций библиотеки:
В данном разделе описаны функции библиотеки pyiArduinoI2Cencoder для работы с Trema модулем - Энкодер, потенциометр, I2C-flash на Raspberry Pi.
Подключение библиотеки:
- Если адрес модуля известен (в примере используется адрес 0x09):
# Подключаем библиотеку для работы с модулем. from pyiArduinoI2Cencoder import * # Создаём объект enc для работы с функциями и методами библиотеки pyiArduinoI2Cencoder, указывая адрес модуля на шине I2C и путь к шине. enc = pyiArduinoI2Cencoder(address = 0x09, bus = "/dev/i2c-3")
- Если адрес модуля неизвестен (адрес будет найден автоматически):
# Подключаем библиотеку для работы с модулем. from pyiArduinoI2Cencoder import * # Создаём объект enc для работы с функциями и методами библиотеки pyiArduinoI2Cencoder. enc = pyiArduinoI2Cencoder(bus = "/dev/i2c-3")
При создании объекта без указания адреса, на шине должен находиться только один модуль.
Функция begin()
- Назначение: Инициализация работы с модулем.
- Синтаксис: begin()
- Параметры: Нет.
- Возвращаемое значение: результат инициализации (True или False).
- Примечание: По результату инициализации можно определить наличие модуля на шине.
- Пример:
if enc.begin() is True:
print( "Модуль найден и инициирован!" )
else
print( "Модуль не найден на шине I2C" )
Функция reset()
- Назначение: Перезагрузка модуля.
- Синтаксис: reset()
- Параметры: Нет.
- Возвращаемое значение: результат перезагрузки (True или False).
- Пример:
if enc.reset():
print("Модуль перезагружен")
else
print("Модуль не перезагружен")
Функция changeAddress()
- Назначение: Смена адреса модуля на шине I2C.
- Синтаксис: changeAddress( АДРЕС )
- Параметры:
- АДРЕС - новый адрес модуля на шине I2C (целое число от 0x08 до 0x7E)
- Возвращаемое значение: результат смены адреса (True или False).
- Примечание: Текущий адрес модуля можно узнать функцией getAddress().
- Пример:
if enc.changeAddress(0x12):
print("Адрес модуля изменён на 0x12")
else
print("Не удалось изменить адрес")
Функция getAddress()
- Назначение: Запрос текущего адреса модуля на шине I2C.
- Синтаксис: getAddress()
- Параметры: Нет.
- Возвращаемое значение: АДРЕС - текущий адрес модуля на шине I2C (от 0x08 до 0x7E)
- Примечание: Функция может понадобиться если адрес модуля не указан при создании объекта, а обнаружен библиотекой.
- Пример:
print(enc.getAddress())
Функция getVersion()
- Назначение: Запрос версии прошивки модуля.
- Синтаксис: getVersion()
- Параметры: Нет
- Возвращаемое значение: ВЕРСИЯ - номер версии прошивки от 0 до 255.
- Пример:
print(enc.getVersion())
Функция getButton()
- Назначение: Запрос времени удержания, состояния, или события кнопки энкодера.
- Синтаксис: getButton( ЗАПРОС )
- Параметр: один из перечисленных вариантов...
- KEY_PUSHED - вернуть ФЛАГ события кнопки - «нажимается».
- KEY_RELEASED - вернуть ФЛАГ события кнопки - «отпускается».
- KEY_CHANGED - вернуть ФЛАГ события кнопки - «состояние изменилось».
- KEY_PRESSED - вернуть ФЛАГ состояния кнопки - «нажата».
- KEY_TRIGGER - вернуть ФЛАГ состояния кнопки - «переключатель».
- KEY_HOLD_05 - вернуть ФЛАГ состояния кнопки - «удерживается» дольше 0,5 сек.
- KEY_HOLD_10 - вернуть ФЛАГ состояния кнопки - «удерживается» дольше 1,0 сек.
- KEY_HOLD_20 - вернуть ФЛАГ состояния кнопки - «удерживается» дольше 2,0 сек.
- KEY_TIME_PRESSED - вернуть ВРЕМЯ удержания кнопки в миллисекундах.
- Параметр: один из перечисленных вариантов...
Возвращаемое значение: зависит от параметра функции:
- ФЛАГ наличия запрашиваемого состояния или события (0 или >0).
- ВРЕМЯ удержания кнопки в миллисекундах (от 0 до 25500).
Примечание:
- Если функция вызвана с параметром
KEY_TIME_PRESSED, то она вернёт ВРЕМЯ удержания кнопки, или0(если кнопка отпущена). При указании любого другого параметра, функция вернёт ФЛАГ соответствующий запрашиваемому состоянию или событию. - Если запрошено событие кнопки (нажимается, отпускается, состояние
изменилось), то функция вернёт
Trueтолько один раз после совершения запрашиваемого события. - Если запрошено состояние кнопки (нажата, переключатель,
удерживается), то функция будет возвращать
Trueвсё время, пока установлено запрашиваемое состояние.
Пример:
i = enc.getButton(KEY_CHANGED) # Переменная i будет установлена в True, если кнопка нажимается или отпускается. uint16 j = enc.getButton(KEY_TIME_PRESSED ) # Переменная j содержит время удержания кнопки в миллисекундах.
Функция getEncoder()
- Назначение: Запрос количества совершённых тактов оборота энкодера.
- Синтаксис: getEncoder( [ НАПРАВЛЕНИЕ ] )
- Параметр: один из перечисленных вариантов...
- ENC_TURN_LEFT - вернуть количество тактов поворота энкодера влево (против ч.с.).
- ENC_TURN_RIGHT - вернуть количество тактов поворота энкодера вправо (по ч.с.).
- ENC_TURN - вернуть разницу межу тактами поворота энкодера влево и вправо.
- Параметр: один из перечисленных вариантов...
Возвращаемое значение: КОЛИЧЕСТВО тактов поворота энкодера.
Примечание:
- Если функция вызвана без параметра, то применяется параметр по
умолчанию
ENC_TURN. - Один полный оборот вала энкодера состоит из 20 тактов.
- Если функция вызвана с параметром
ENC_TURN_LEFTилиENC_TURN_RIGHT, то она вернёт количество тактов поворота энкодера (от 0 до 255) совершённых после последнего обращения к функции с тем же параметром, или параметромENC_TURN. - Если с момента последнего запроса совершено более 255 тактов, то функция вернёт 255.
- Если функция вызвана с параметром
ENC_TURN, то она вернёт разницу тактов поворота энкодера (от -255 до 255) совершённых после последнего обращения к функции.
Пример:
# Предположим, совершено 2 такта влево и 3 такта вправо: i = enc.getEncoder(ENC_TURN_LEFT ) # Переменная i содержит значение 2. # Предположим, совершено еще 2 такта влево и 3 такта вправо: j = enc.getEncoder(ENC_TURN_LEFT ) # Переменная j содержит значение 2. k = enc.getEncoder(ENC_TURN_RIGHT) # Переменная k содержит значение 6.
Функция getPosition()
- Назначение: Запрос текущей позиции вала энкодера.
- Синтаксис: getPosition()
- Параметр: Нет.
- Возвращаемое значение: ПОЗИЦИЯ - значение от 0 до ±1260.
- Примечание:
- Функция возвращает позицию поворота вала энкодера в тактах от
нулевой точки (от положения в котором вал находился при подаче питания,
или при обращении к функции сброса текущей позиции
resPosition()), до максимального количества тактов заданных функциейsetPosSettings(). - Один полный оборот вала энкодера состоит из 20 тактов.
- Функция возвращает позицию поворота вала энкодера в тактах от
нулевой точки (от положения в котором вал находился при подаче питания,
или при обращении к функции сброса текущей позиции
- Пример:
# Предположим, совершено 2 такта влево (против ч.с.) и 3 такта вправо (по ч.с.): i = enc.getPosition() # Переменная i содержит значение 1. # Предположим, совершено еще 2 такта влево и 3 такта вправо: j = enc.getPosition() # Переменная j содержит значение 2.
Функция resPosition()
- Назначение: Сброс текущей позиции вала энкодера.
- Синтаксис: resPosition()
- Параметры: Нет
- Возвращаемое значение: результат сброса позиции (True или False).
- Примечание:
- Функция
getPosition()будет вести счет текущей позиции вала энкодера от того положения в котором он находился при обращении к функцииresPosition().
- Функция
- Пример:
# Предположим, совершено 2 такта влево (против ч.с.): i = enc.getPosition() # Переменная i содержит значение -2. enc.resPosition() # Принимаем текущее положение вала энкодера за позицию 0. # Предположим, совершено 2 такта вправо (по ч.с.): j = enc.getPosition() # Переменная j содержит значение 2.
Функция setPosSettings()
- Назначение: Настройка получения позиции вала энкодера.
- Синтаксис: setPosSettings( ОБОРОТЫ [, ЗНАК ] )
- Параметры:
- ОБОРОТЫ - максимальное количество полных оборотов вала энкодера, от 1 до 63.
- ЗНАК - флаг разрешающий отрицательные значения положения вала энкодера.
- Возвращаемое значение: результат сохранения настроек (True или False).
- Примечание:
- Указанное количество оборотов определяет границу положения вала
энкодера возвращаемую функцией
getPosition(). В одном обороте 20 тактов. Если указать 3 оборота, то функцияgetPosition()будет выводить числа от 0 до 60 (достигнув значения 0 оно перестанет уменьшаться, а достигнув значения 60, оно перестанет приращаться). - Если в качестве второго параметра указать
True, то функцияgetPosition()будет возвращать числа от 0 до ± количества тактов в заданном количестве оборотов. - Если в качестве второго аргумента указать
Falseили не указывать его вообще, то минимальным значением возвращаемым функциейgetPosition()будет0.
- Указанное количество оборотов определяет границу положения вала
энкодера возвращаемую функцией
- Пример:
enc.setPosSettings(5, True) # Указываем считать до 5 оборотов от 0 со знаком. i = enc.getPosition() # Переменная i содержит значение от -5*20 до +5*20.
Функция setPinOut()
- Назначение: Настройка работы выхода модуля.
- Синтаксис: setPinOut( РЕЖИМ [, ОБОРОТЫ [, ЧАСТОТА]] )
- Параметры:
- РЕЖИМ - режим работы выхода модуля:
- ENC_PIN_MODE_OFF - Выход модуля отключён.
- ENC_PIN_MODE_KEY - Вывод модуля работает как выход кнопки вала энкодера.
- ENC_PIN_MODE_TRG - Выход модуля работает как кнопочный переключатель (триггер).
- ENC_PIN_MODE_PWM - Выход модуля работает в режиме ШИМ.
- ENC_PIN_MODE_PWM_LOG - Выход модуля выводит логарифмический ШИМ.
- ENC_PIN_MODE_DAC - Выход работает в аналоговом режиме (ЦАП).
- ENC_PIN_MODE_SER - Выход модуля работает в режиме управления сервоприводами.
- ОБОРОТЫ - максимальное количество полных оборотов вала энкодера, от 1 до 15.
- ЧАСТОТА - частота работы ШИМ, от 1 до 12'000 Гц.
- РЕЖИМ - режим работы выхода модуля:
- Возвращаемое значение: результат сохранения настроек (True или False).
Примечание:
- Все настройки вывода сохраняются в энергонезависимую память модуля. Это значит, что вывод можно однократно запрограммировать и использовать модуль в проектах без подключения к шине I2C.
- Указанное количество оборотов определяет, за сколько полных оборотов вала энкодера, значение ШИМ или АЦП, на выходе модуля, изменится от 0 до 100%.
- Если вывод работает в режиме ШИМ или АЦП, то можно указать частоту ШИМ в Гц, от 1 до 12'000.
- Если вывод работает в режиме управления сервоприводом, то частоту ШИМ указать нельзя, так как управление сервоприводами осуществляется только на частоте 50 Гц.
- Аналоговый режим работы выхода осуществляется подачей ШИМ через сглаживающий RC-фильтр, что позволяет получить на выходе модуля напряжение регулируемое от 0 до 3,3 В.
- Режим логарифмического ШИМ лучше подходит для управления яркостью осветительных приборов (например, светодиодов), чем обычный (линейный) ШИМ.
Пример:
enc.setPinOut(ENC_PIN_MODE_KEY) # Вывод работает в режиме кнопки. На выходе будет 1 пока нажат вал энкодера. enc.setPinOut(ENC_PIN_MODE_TRG) # Вывод работает в режиме переключателя. Логический уровень на выходе модуля будет меняться с каждым новым нажатием на вал энкодера. enc.setPinOut(ENC_PIN_MODE_DAC,2) # Вывод работает в аналоговом режиме. Напряжение на выходе модуля изменится от 0 до 3,3В за 2 полных оборота энкодера. enc.setPinOut(ENC_PIN_MODE_SER,3) # Вывод работает в режиме управления сервоприводом. Вал сервопривода поворачивается от минимального до максимального угла за 3 полных оборота энкодера.
Функция invEncoder()
- Назначение: Инверсия направления поворота вала энкодера.
- Синтаксис: invEncoder( ФЛАГ )
- Параметры: ФЛАГ инверсии направления поворота вала энкодера.
- Возвращаемое значение: результат сохранения настроек (True или False).
Примечание:
- Установка флага приводит к инверсии направления поворота вала энкодера. Поворот влево будет расцениваться как поворот вправо, а поворот вправо как поворот влево.
- Флаг инверсии сохраняется в энергонезависимую память модуля. Это значит, что флаг можно задать однократно, а его значение сохранится и после отключения питания.
- Флаг инверсии направления поворота влияет не только на те данные которые можно прочитать по шине I2C, но и на поведение модуля в режиме управления выходом.
Пример:
enc.invEncoder( True ) # Указываем расценивать поворот вала энкодера влево как поворот вправо, а поворот вправо как поворот влево. enc.invEncoder( False ) # Указываем расценивать поворот вала энкодера как есть, без инверсии, влево значит влево, вправо значит вправо.
Функция setServoLimit()
- Назначение: Ограничение углов сервопривода при управлении им в автономном режиме.
- Синтаксис: setServoLimit( ШИРИНА, ШИРИНА )
- Параметры:
- ШИРИНА - ширина импульсов ШИМ в мкс., соответствующая требуемому углу.
- Возвращаемое значение: результат сохранения настроек (True или False).
Примечание:
- Для управления сервоприводом необходимо настроить вывод энкодера
функцией
setPinOut()с параметромENC_PIN_MODE_SER. - Управление сервоприводом осуществляется подачей на его вход сигнала ШИМ с частотой 50 Гц. Угол сервопривода устанавливается в зависимости от ширины импульсов ШИМ. Для большинства сервоприводов минимальному углу соответствует ширина импульсов в районе 450-550 мкс, а максимальному углу ширина 2400-2500 мкс.
- Функцией
getServoWidth()можно узнать какому углу соответствует какая ширина импульсов. - Параметры для минимального и максимального угла можно указывать в любом порядке.
- Указанные функцией ограничения сохраняются в энергонезависимую память модуля. Это значит, что фал сервопривода будет поворачиваться в указанном диапазоне даже после отключения и подачи питания.
Пример:
enc.setServoLimit( 450, 2450 ) # Снимаем ограничения хода вала сервопривода. enc.setServoLimit( 1000, 2000 ) # Ограничиваем ход вала сервопривода импульсами от 1000 мкс до 2000 мкс. enc.setServoLimit( 2000, 1000 ) # Эта строка делает то же самое что и предыдущая.
Функция getServoWidth()
- Назначение: Запрос ширины импульсов текущего положения вала сервопривода.
- Синтаксис: getServoWidth()
- Параметры: Нет.
- Возвращаемое значение: ШИРИНА - текущая ширина импульсов ШИМ в мкс.
Примечание:
- Получить ширину импульсов ШИМ управления сервоприводом можно только
если выход модуля настроен на режим управления сервоприводом. Настройка
вывода осуществляется обращением к функции
setPinOut()с параметромENC_PIN_MODE_SER. - Функция получения ширины импульсов может быть полезна для
ограничения хода вала сервопривода функцией
setServoLimit().
Пример:
# Получаем ширину импульсов шим соответствующую текущему положению вала сервопривода. i = enc.getServoWidth()
Функция changeBus()
- Назначение: Установка шины I2C
- Синтаксис: changeBus( ПУТЬ К ФАЙЛУ ШИНЫ )
- Параметр:
- ПУТЬ К ФАЙЛУ ШИНЫ - строка
- Возвращаемые значения: Нет.
- Пример:
# Меняем шину
enc.changeBus("/dev/i2c-3")

Обсуждение