



 |  |
Общие сведения:
Модуль - Мотор-редуктор с управляющим контроллером, I2C-flash - является устройством состоящим из коллекторного двигателя с редуктором и платы управления, подключаемой к шине I2С.
Модуль относится к серии «Flash», а значит к одной шине I2C можно подключить более 100 модулей, так как их адрес на шине I2C (по умолчанию 0x09), хранящийся в энергонезависимой памяти, можно менять программно.
Модуль можно использовать для управления подвижными механизмами (машины, танки, тракторы), а так же для управления роботами и станками.
Модуль выполнен в двух вариантах - с энкодером и без энкодера
| Без энкодера | С энкодером | |
|---|---|---|
 |
 |
|
| Управление скоростью, ШИМ |  |
|
| Управление скоростью, м/c, обороты/c |  |
|
| Остановка по заданному времени | |
|
| Остановка по заданному расстоянию | |
|
| Остановка по заданному кол-ву оборотов вала | |
|
| Получение пройденного пути | |
|
Функции setSpeed(), getSpeed(),
setStop() и getSum(), вызванные с параметрами
MOT_RPM, MOT_M_S, MOT_MET и MOT_REV поддерживаются только модулем с
установленным энкодером.
Видео:
Редактируется ...
Спецификация:
- Напряжение питания логики: 5 В (номинально), или 3,3 В.
- Диапазон напряжений мотора поддерживаемый драйвером: 2,7 В ... 12 В.
- Максимальный ток мотора поддерживаемый драйвером: до 3 А (пиковый ток до 4 А).
- Драйвер оснащён защитой от перегрева и перегрузки по току.
- Интерфейс: I2C.
- Скорость шины I2C: 100 кбит/с.
- Адрес на шине I2C: устанавливается программно (по умолчанию 0x09).
- Уровень логической 1 на линиях шины I2C: Vcc.
- Рабочая температура: от -20 до +70 °С.
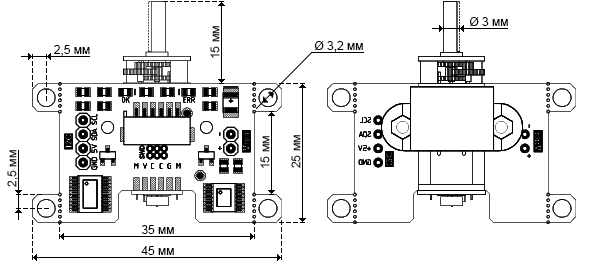
- Габариты: 45 х 40 мм.
- Вес: 32 г.
Подключение:
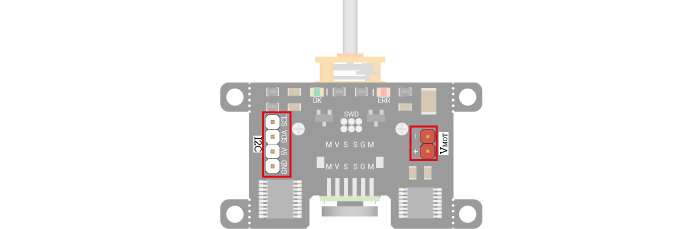
На плате модуля расположен разъем из 4 выводов для подключения к шине I2C.
- SCL - вход/выход линии тактирования шины I2C.
- SDA - вход/выход линии данных шины I2C.
- 5V - вход питания +5 В (номинально), или 3,3 В.
- GND - общий вывод питания (соединён с выводом питания мотора -VMOT).
А так же разъем из 2 выводов для подачи питания на мотор через драйвер модуля.
- +VMOT - вход питания мотора от +2,7 В до +12 В.
- -VMOT - общий вывод питания (соединён с выводом GND).
Модуль удобно подключать 2 способами, в зависимости от ситуации:
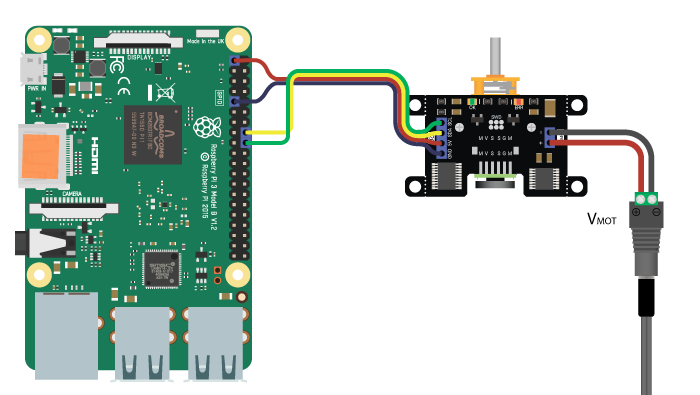
Способ - 1: Используя провода и Raspberry Pi
Используя провода «Мама — Мама», подключаем напрямую к Raspberry Pi, согласно следующей таблице:
| Вывод модуля | Вывод Raspberry |
|---|---|
| Vcc | 3.3V |
| GND | GND |
| SDA | GPIO 23 |
| SCL | GPIO 24 |
В этом случае необходимо питать логическую часть модуля от 3,3 В Raspberry
Способ - 2: Используя Trema+Expander Hat
Подключаем к Trema+Expander Hat:

Питание:
Входное напряжение питания модуля 5В (номинально), или 3,3В постоянного тока, подаётся на выводы 5V и GND.
Входное напряжение питания мотора от 2,7В до 12В постоянного тока, подаётся на выводы +VMOT и -VMOT.
Подробнее о модуле:
Модуль построен на базе двигателя GM12-N20, редуктора, микроконтроллера STM32F030F4 и драйвера DRV8833, снабжен многополюсным магнитным валом, датчиками Холла, и собственным стабилизатором напряжения. Модуль способен поддерживать заданную скорость и направление вращения вала, сверяясь с показаниями датчиков Холла. Модуль самостоятельно обрабатывает данные с датчиков и корректирует скорость. На плате модуля имеется красный светодиод информирующий об отличии реальной скорости от заданной.
Модуль позволяет:
- Менять свой адрес на шине I2C.
- Управлять внутренней подтяжкой линий шины I2C (по умолчанию включена).
- Менять передаточное отношение редуктора мотора (при его замене).
- Менять количество полюсов (одной полярности) магнитного вала (при его замене).
- Менять борт установки мотора (левый мотор / правый мотор).
- Задать скорость вращения вала указав количество оборотов в минуту, ШИМ в % или метры в секунду. Во всех случаях можно указывать отрицательные значения для вращения в обратную сторону.
- Узнать отличается ли заданная скорость вращения вала от реальной, а так же указать процент отклонения при котором будет включаться красный светодиод на плате модуля.
- Узнать текущую скорость вращения вала. Скорость вращения вала определяется по показаниям с датчиков Холла, даже если мотор отключён, а вал вращается по средством внешних сил.
- Узнать количество совершённых полных оборотов вала. Количество оборотов вала определяется по показаниям с датчиков Холла, даже если мотор отключён, а вал вращается по средством внешних сил.
- Остановить двигатель и/или указать тип его остановки. Двигатель может быть остановлен двумя способами: отключением мотора (свободный ход) или торможением (стопор). Заданный тип применяется ко всем последующим остановкам двигателя.
- Остановить двигатель по истечении заданного количества полных оборотов вала, по истечении пройденного пути, или по истечении заданного времени.
- Узнать о наличии ошибки драйвера (перегрузка по току, перегрев, низкое напряжение).
Специально для работы с модулем - Мотор-редуктор с управляющим контроллером, I2C-flash, нами разработана библиотека pyiArduinoI2Cmotor которая позволяет реализовать все функции модуля.
Для работы с модулем необходимо включить шину I2C.
Для подключения библиотеки необходимо сначала её установить. Сделать это можно в менеджере модулей в Thonny или в терминале Raspberry, в виртуальной среде, командой:
pip install pyiArduinoI2Cmotor
Подробнее об установке библиотек можно узнать в этой статье.
Примеры:
Смена адреса модуля на шине I2C:
Пример позволяет указать адрес модулю, даже если его текущий адрес Вам неизвестен.
# Подключаем библиотеку для работы с модулем
from pyiArduinoI2Cmotor import *
import sys
# Объявляем объект module для работы с функциями и методами библиотеки pyiArduinoI2Cled.
# Если при объявлении объекта указать адрес, например, module(0x0B),
# то пример будет работать с тем модулем, адрес которого был указан.
module = pyiArduinoI2Cmotor(auto = NO_BEGIN, bus = "/dev/i2c-3")
# Если сценарию не были переданы аргументы
if len(sys.argv) < 2:
# Назначаем модулю адрес (0x07 < адрес < 0x7F).
newAddress = 0x09
# Иначе
else:
# Новый адрес - первый аргумент
newAddress = int(sys.argv[1])
# Если модуль найден
if module.begin():
print("Найден модуль %#.2x" % module.getAddress())
# Если адрес удалось изменить
if module.changeAddress(newAddress):
print("Адрес изменён на %#.2x" % module.getAddress())
else:
print("Адрес не изменён!")
else:
print("Модуль не найден!")
Для работы данного примера, на шине I2C должен быть только один мотор.
Данный скетч демонстрирует не только возможность смены адреса на
указанный в переменной newAddress, но и обнаружение, и
вывод текущего адреса модуля на шине I2C.
Запуск мотора с указанием скорости:
Пример позволяет запустить мотор указав количество оборотов в минуту.
# Подключаем библиотеку для работы с мотором I2C-flash.
from pyiArduinoI2Cmotor import *
from time import sleep
# Объявляем объект для работы с функциями и методами библиотеки pyiArduinoI2Cmotor, указывая адрес модуля на шине I2C.
mot = pyiArduinoI2Cmotor(address = 0x09, bus = "/dev/i2c-3")
while True:
# Запускаем мотор на скорости 120 об/мин и ждём 5 секунд.
mot.setSpeed( 120, MOT_RPM)
sleep(5)
# Останавливаем мотор и ждём 5 секунд.
mot.setStop()
sleep(5)
# Запускаем мотор на скорости -120 об/мин и ждём 5 секунд.
mot.setSpeed(-120, MOT_RPM)
sleep(5)
# Останавливаем мотор и ждём 5 секунд.
mot.setStop()
sleep(5)
После загрузки данного примера, начнёт выполняться цикл состоящий из 4 действий: запуск мотора на скорости 120 об/мин на 5 секунд, остановка мотора на 5 секунд, запуск мотора на скорости 120 об/мин на 5 секунд в противоположную сторону, остановка мотора на 5 секунд.
Второй параметр функции setSpeed() указывает как задана
скорость:
MOT_RPM- скорость задана количеством оборотов в минуту от 0 до ±32'767 об/мин.MOT_PWM- скорость задана коэффициентом заполнения ШИМ от 0 до ±100.0%.MOT_M_S- скорость задана в м/сек. (должен быть указан радиус колесаmot.radius).
Запуск мотора для движения на указанное расстояние:
Пример запускает мотор однократно, указав модулю самостоятельно остановить мотор после преодоления определённого расстояния.
# Подключаем библиотеку для работы с мотором I2C-flash. from pyiArduinoI2Cmotor import * from time import sleep # Объявляем объект для работы с функциями и методами библиотеки pyiArduinoI2Cmotor, указывая адрес модуля на шине I2C. mot = pyiArduinoI2Cmotor(address = 0x09, bus = "/dev/i2c-3") mot.radius = 12.2 # Указываем радиус колеса в мм. #mot.setSpeed(100, MOT_RPM, 5.5, MOT_REV) # Запускаем мотор на скорости 100 об/мин с остановкой через 5 с половиной оборотов вала. #mot.setSpeed(100, MOT_RPM, 2, MOT_SEC) # Запускаем мотор на скорости 100 об/мин с остановкой через 2 секунды. mot.setSpeed(100, MOT_RPM, 0.05, MOT_MET) # Запускаем мотор на скорости 100 об/мин с остановкой через 0.05 метров = 5см = 50мм.
Данный пример запускает мотор на скорости 100 об/мин, передав модулю условие остановки мотора.
Второй параметр функции setSpeed() указывает как задана
скорость:
MOT_RPM- скорость задана количеством оборотов в минуту от 0 до ±32'767 об/мин.MOT_PWM- скорость задана коэффициентом заполнения ШИМ от 0 до ±100.0%.MOT_M_S- скорость задана скоростью движения в м/сек.
Четвёртый параметр функции setSpeed() указывает как
задано условие остановки:
MOT_REV- условие остановки задано количеством оборотов вала от 0,01 до 167'772,15.MOT_SEC- условие остановки задано временем от 0,001 до 16'777,215 секунд.MOT_MET- условие остановки задано расстоянием пройденного пути в метрах.
Обратите внимание на то, что если скорость задана в м/сек
(MOT_M_S) или условием остановки является расстояние
пройденного пути в метрах (MOT_MET), то необходимо
однократно указать радиус колеса в миллиметрах
(mot.radius=РАДИУС) используемого для движения.
Остановка мотора с освобождением ротора или без такового:
Пример определяет поведение мотора при остановке. Мотор может быть
остановлен двумя способами: отключением мотора (свободный ход) или
торможением (стопор). Тип остановки заданный функцией
setStopNeutral() применяется ко всем последующим остановкам
двигателя.
# Подключаем библиотеку для работы с мотором I2C-flash.
from pyiArduinoI2Cmotor import *
from time import sleep
# Объявляем объект для работы с функциями и методами библиотеки pyiArduinoI2Cmotor, указывая адрес модуля на шине I2C.
mot = pyiArduinoI2Cmotor(address = 0x09, bus = "/dev/i2c-3")
while True:
# Запускаем и плавно останавливаем мотор:
# Запускаем мотор на максимальной скорости, указав максимальное значение ШИМ = 100%.
mot.setSpeed(100.0, MOT_PWM)
sleep(5)
# Указываем освободить мотор при его остановке. Ротор остановленного мотора можно вращать.
mot.setStopNeutral(True)
# Останавливаем мотор. Обратите внимание на то, что ротор мотора останавливается плавно.
mot.setStop()
sleep(1)
# Запускаем и резко останавливаем мотор:
# Запускаем мотор на максимальной скорости, указав максимальное значение ШИМ = 100%.
mot.setSpeed(100.0, MOT_PWM)
sleep(5)
# Указываем не освобождать мотор при его остановке. Ротор остановленного мотора будет застопорен.
mot.setStopNeutral(False)
# Останавливаем мотор. Обратите внимание на то, что ротор мотора останавливается резко.
mot.setStop()
sleep(1)
После загрузки данного примера, мотор будет запускаться и останавливаться, но остановка мотора будет либо плавной (ротор свободно останавливается), либо резкой (ротор стопорится).
Функция setStopNeutral() не останавливает мотор, а
указывает его поведение при остановке. Останавливается мотор функцией
setStop().
Второй параметр функции setSpeed() указывает как задана
скорость:
MOT_RPM- скорость задана количеством оборотов в минуту от 0 до ±32'767 об/мин.MOT_PWM- скорость задана коэффициентом заполнения ШИМ от 0 до ±100.0%.MOT_M_S- скорость задана в м/сек. (должен быть указан радиус колесаmot.radius).
Изменение установки мотора (мотор слева / мотор справа):
При использовании модулей для управления подвижным механизмом,
например, машиной, чаще всего устанавливают два мотора слева и справа.
Если при такой установке задать обоим моторам одинаковую скорость (для
движения механизма по прямой), то один мотор будет двигать механизм
вперёд, а второй назад. Избежать такого поведения можно отправляя
скорость с разными знаками для разных моторов, а можно однократно
указать тип установки моторов при помощи функции
setDirection().
# Подключаем библиотеку для работы с мотором I2C-flash.
from pyiArduinoI2Cmotor import *
from time import sleep
# Объявляем объект mot1 для работы с функциями и методами библиотеки pyiArduinoI2Cmotor, указывая адрес модуля на шине I2C.
mot1 = pyiArduinoI2Cmotor(address = 0x09, bus = "/dev/i2c-3")
# Объявляем объект mot2 для работы с функциями и методами библиотеки pyiArduinoI2Cmotor, указывая адрес модуля на шине I2C.
mot2 = pyiArduinoI2Cmotor(address = 0x0A, bus = "/dev/i2c-3")
# При наличии нескольких моторов на шине I2C нельзя объявлять объект без указания адреса.
# Задаём направление вращения для 1 мотора: по часовой стрелке при положительных скоростях и против при отрицательных.
mot1.setDirection(True)
# Задаём направление вращения для 2 мотора: против часовой стрелки при положительных скоростях и по при отрицательных.
mot2.setDirection(False)
while True:
mot1.setSpeed(120, MOT_RPM) # Запускаем мотор 1 на скорости 120 об/мин.
mot2.setSpeed(120, MOT_RPM) # Запускаем мотор 2 на скорости 120 об/мин.
sleep(5) # Ждём 5 секунд.
mot1.setStop() # Останавливаем мотор 1.
mot2.setStop() # Останавливаем мотор 2.
sleep(5) # Ждём 5 секунд.
Моторы, колеса которых вращаются по часовой стрелке, при положительных скоростях, устанавливают по правому борту, а против часовой стрелки, по левому.
Если моторы расположить: 1 справа, 2 слева. То при одинаковых положительных скоростях механизм будет двигаться строго вперёд, а при одинаковых отрицательных, строго назад.
Описание функций библиотеки:
В данном разделе описаны функции библиотеки iarduino_I2C_Motor для работы с модулем - Мотор-редуктор с управляющим контроллером, I2C-flash.
Данная библиотека может использовать как аппаратную, так и программную реализацию шины I2C. О том как выбрать тип шины I2C рассказано в статье Wiki - расширенные возможности библиотек iarduino для шины I2C.
Подключение библиотеки:
- Если адрес модуля известен (в примере используется адрес 0x09):
# Подключаем библиотеку для работы с мотором I2C-flash. from pyiArduinoI2Cmotor import * # Объявляем объект mot1 для работы с функциями и методами библиотеки pyiArduinoI2Cmotor, указывая адрес модуля на шине I2C. mot = pyiArduinoI2Cmotor(address = 0x09, bus = "/dev/i2c-3")
- Если адрес модуля неизвестен (адрес будет найден автоматически):
# Подключаем библиотеку для работы с мотором I2C-flash. from pyiArduinoI2Cmotor import * # Создаём объект mot для работы с функциями и методами библиотеки iarduino_I2C_Motor, без указания адреса. mot = pyiArduinoI2Cmotor(bus = "/dev/i2c-3")
- При создании объекта без указания адреса, на шине должен находиться только один модуль.
Функция reset()
- Назначение: Перезагрузка модуля.
- Синтаксис: reset()
- Параметры: Нет.
- Возвращаемое значение: - результат перезагрузки (True или False).
- Пример:
if mot.reset():
print( "Модуль перезагружен" )
else:
print( "Модуль не перезагружен" )
Функция changeAddress()
- Назначение: Смена адреса модуля на шине I2C.
- Синтаксис: changeAddress( АДРЕС )
- Параметр:
- АДРЕС - новый адрес модуля на шине I2C (целое число от 0x08 до 0x7E)
- Возвращаемое значение: - результат смены адреса (True или False).
- Примечание:
- Адрес модуля сохраняется в энергонезависимую память, а значит будет действовать и после отключения питания.
- Текущий адрес модуля можно узнать функцией getAddress().
- Пример:
if mot.changeAddress(0x12):
print( "Адрес модуля изменён на 0x12" )
else:
print( "Не удалось изменить адрес" )
Функция getAddress()
- Назначение: Запрос текущего адреса модуля на шине I2C.
- Синтаксис: getAddress()
- Параметры: Нет.
- Возвращаемое значение: АДРЕС - текущий адрес модуля на шине I2C (от 0x08 до 0x7E)
- Примечание: Функция может понадобиться если адрес модуля не указан при создании объекта, а обнаружен библиотекой.
- Пример:
print( "Адрес модуля на шине I2C = 0x" % mot.getAddress() )
Функция getVersion()
- Назначение: Запрос версии прошивки модуля.
- Синтаксис: getVersion()
- Параметры: Нет
- Возвращаемое значение: ВЕРСИЯ - номер версии прошивки от 0 до 255.
- Пример:
print( "Версия прошивки модуля " ) print( mot.getVersion() )
Функция setPullI2C()
- Назначение: Управление внутрисхемной подтяжкой линий шины I2C.
- Синтаксис: setPullI2C( [ФЛАГ] )
- Параметр:
- ЛАГ требующий установить внутрисхемную подтяжку линий шины I2C (True или False).
- Возвращаемое значение:
- результат включения / отключения внутрисхемной подтяжки (True или False).
- Примечание:
- Вызов функции без параметра равносилен вызову функции с параметром True - установить.
- Флаг установки внутрисхемной подтяжки сохраняется в энергонезависимую память модуля, а значит будет действовать и после отключения питания.
- Внутрисхемная подтяжка линий шины I2C осуществляется до уровня 3,3 В, но допускает устанавливать внешние подтягивающие резисторы и иные модули с подтяжкой до уровня 3,3 В или 5 В, вне зависимости от состояния внутрисхемной подтяжки модуля.
- Пример:
if mot.setPullI2C(True ):
print( "Внутрисхемная подтяжка установлена." )
if mot.setPullI2C(False):
print( "Внутрисхемная подтяжка отключена." )
Функция getPullI2C()
- Назначение: Запрос состояния внутрисхемной подтяжки линий шины I2C.
- Синтаксис: getPullI2C()
- Параметры: Нет.
- Возвращаемое значение: - ФЛАГ включения внутрисхемной подтяжки (True или False).
- Пример:
if mot.getPullI2C():
print( "Внутрисхемная подтяжка включена." )
else:
print( "Внутрисхемная подтяжка отключена." )
Функция setSpeed()
- Назначение: Установка скорости.
- Синтаксис: setSpeed( СКОРОСТЬ, ТИП СКОРОСТИ [, УСЛОВИЕ, ТИП УСЛОВИЯ ] )
- Параметры:
- ТИП СКОРОСТИ - принимает одно из трёх значений:
- MOT_RPM - скорость задана количеством оборотов в минуту.
- MOT_PWM - скорость задана коэффициентом заполнения ШИМ.
- MOT_M_S - скорость задана в м/сек.
- СКОРОСТЬ - значение зависит от указанного типа скорости.
- Если тип скорости задан значением MOT_RPM, то скорость указывается количеством оборотов в минуту, от 0 до ±32'767.
- Если тип скорости задан значением MOT_PWM, то скорость указывается коэффициентом заполнения ШИМ, от 0 до ±100,0%. (шаг 0,025%).
- Если тип скорости задан значением MOT_M_S, то скорость указывается в м/сек.
- ТИП УСЛОВИЯ - принимает одно из тёх значений:
- MOT_REV - условие остановки задано количеством полных оборотов вала.
- MOT_SEC - условие остановки задано временем.
- MOT_MET - условие остановки задано расстоянием.
- УСЛОВИЕ - условие остановки, значение зависит от указанного типа условия:
- Если тип условия задан значением MOT_REV, то в качестве условия указывается количество полных оборотов до остановки, от 0.01 до 167'772.15 оборотов.
- Если тип условия задан значением MOT_SEC, то в качестве условия указывается время до остановки, от 0,001 до 16'777,215 секунд.
- Если тип условия задан значением MOT_MET, то в качестве условия указывается расстояние до остановки в метрах.
- Возвращаемое значение: - результат установки скорости (True или False).
- Примечание:
- СКОРОСТЬ может быть отрицательной, знак указывает на направление вращения.
- Если функция указана без параметров УСЛОВИЕ и ТИП УСЛОВИЯ, то мотор
будет запущен на указанной скорости, пока не будет остановлен функцией
setStop(). - Если функция указана с параметрами УСЛОВИЕ и ТИП УСЛОВИЯ, то мотор будет остановлен модулем самостоятельно, по истечении указанного условия остановки.
- Если в качестве типа скорости указано значение
MOT_M_S(скорость в м/сек) или в качестве типа условия остановки указано значениеMOT_MET(расстояние в метрах), то до обращения к данной функции должен быть указан радиус колесаmot.radius=РАДИУС. Радиус указывается в мм, его можно указать однократно в кодеsetup(). - Если скорость задана не значением ШИМ, то пока мотор не достигнет
указанной скорости, на плате модуля будет светиться красный светодиод, а
функция
getError()будет возвращать ошибку скоростиMOT_ERR_SPD. - Задавать скорость через ШИМ удобно в тех случаях, когда мотор требуется запустить в процентах от его максимальной скорости.
- Если на роторе мотора нет кольцевого магнита, или в модуле нет
датчиков Холла, тогда:
- Установка скорости с параметром
MOT_RPMилиMOT_M_Sбудет проигнорирована. - Условие остановки с параметром
MOT_REVилиMOT_METбудет проигнорировано.
- Установка скорости с параметром
- Проверить наличие магнита и датчиков Холла можно функцией
getMagnet().
- Пример:
mot.setSpeed(60, MOT_RPM) # Запускаем мотор на скорости 60 об/мин. mot.setSpeed(60, MOT_RPM, 0.1, MOT_MET) # Запускаем мотор на скорости 60 об/мин с остановкой мотора через 0.1 метра. mot.setSpeed(60, MOT_RPM, 3.5, MOT_REV) # Запускаем мотор на скорости 60 об/мин с остановкой через 3,5 оборота вала. mot.setSpeed(60, MOT_RPM, 2, MOT_SEC) # Запускаем мотор на скорости 60 об/мин с остановкой через 2 секунды. mot.setSpeed(50.0, MOT_PWM) # Запускаем мотор на 50%. mot.setSpeed(50.0, MOT_PWM, 0.1, MOT_MET) # Запускаем мотор на 50% с остановкой мотора через 0.1 метра. mot.setSpeed(50.0, MOT_PWM, 3.5, MOT_REV) # Запускаем мотор на 50% с остановкой через 3,5 оборота вала. mot.setSpeed(50.0, MOT_PWM, 2, MOT_SEC) # Запускаем мотор на 50% с остановкой через 2 секунды. mot.setSpeed(0.01, MOT_M_S) # Запускаем мотор на скорости 0,01 м/сек. mot.setSpeed(0.01, MOT_M_S, 0.1, MOT_MET) # Запускаем мотор на скорости 0,01 м/сек с остановкой мотора через 0.1 метра. mot.setSpeed(0.01, MOT_M_S, 3.5, MOT_REV) # Запускаем мотор на скорости 0,01 м/сек с остановкой через 3,5 оборота вала. mot.setSpeed(0.01, MOT_M_S, 2, MOT_SEC) # Запускаем мотор на скорости 0,01 м/сек с остановкой через 2 секунды.
Функция getSpeed()
- Назначение: Получение реальной скорости или ШИМ.
- Синтаксис: getSpeed( ТИП )
- Параметр: ТИП - тип получаемого значения:
- MOT_RPM - получить реальную скорость количеством оборотов в минуту.
- MOT_PWM - получить текущий коэффициент заполнения ШИМ.
- MOT_M_S - получить реальную скорость в м/сек.
- Возвращаемое значение: - реальная скорость, значение зависит от
запрошенного типа:
- Если тип задан значением MOT_RPM, то функция возвращает реальную скорость количеством оборотов в минуту от 0 до ±32'767.
- Если тип задан значением MOT_PWM, то функция возвращает текущий коэффициент заполнения ШИМ от 0 до ±100.0% (шаг 0,025%).
- Если тип задан значением MOT_M_S, то функция возвращает реальную скорость в м/сек.
- Примечание:
- Скорость вращения вала определяется по показаниям с датчиков Холла,
вне зависимости от того, как запущен мотор, функцией
setSpeed()или его вал вращается по средством внешних сил, даже если мотор отключён. - Возвращаемое значение может быть отрицательным, знак указывает на направление вращения.
- Если в качестве типа получаемого значения указано
MOT_M_S(получить скорость в м/сек), то до обращения к данной функции должен быть указан радиус колесаmot.radius=РАДИУС. Радиус указывается в мм, его можно указать однократно в кодеsetup(). - Если на роторе мотора нет кольцевого магнита, или в модуле нет
датчиков Холла, тогда функция будет возвращать 0, если её вызвать с
параметром
MOT_RPMилиMOT_M_S. - Проверить наличие магнита и датчиков Холла можно функцией
getMagnet().
- Скорость вращения вала определяется по показаниям с датчиков Холла,
вне зависимости от того, как запущен мотор, функцией
- Пример:
i = mot.getSpeed( MOT_RPM ) # Получить реальную скорость в об/мин. j = mot.getSpeed( MOT_M_S ) # Получить реальную скорость в м/сек. k = mot.getSpeed( MOT_PWM ) # Получить текущий коэффициент заполнения ШИМ.
Функция setStop()
- Назначение: Остановка мотора с условием или без.
- Синтаксис: setStop( [ УСЛОВИЕ, ТИП ] )
- Параметры:
- ТИП - тип условия остановки, принимает одно из тёх значений:
- MOT_REV - условие остановки задано количеством полных оборотов вала.
- MOT_SEC - условие остановки задано временем.
- MOT_MET - условие остановки задано расстоянием.
- УСЛОВИЕ - условие остановки, значение зависит от типа условия:
- Если тип задан значением MOT_REV, то в качестве условия указывается количество полных оборотов до остановки, от 0.01 до 167'772.15 оборотов.
- Если тип задан значением MOT_SEC, то в качестве условия указывается время до остановки, от 0,001 до 16'777,215 секунд.
- Если тип задан значением MOT_MET, то в качестве условия указывается расстояние до остановки в метрах.
- Возвращаемое значение: - результат записи данных остановки в модуль.
- Примечание:
- Если функция указана без параметров, то мотор будет остановлен сразу.
- Если функция указана с параметрами УСЛОВИЕ и ТИП, то мотор будет остановлен модулем самостоятельно, по истечении указанного условия остановки.
- Если в качестве типа условия остановки указано значение
MOT_MET(расстояние в метрах), то до обращения к данной функции должен быть указан радиус колесаmot.radius=РАДИУС. Радиус указывается в мм, его можно указать однократно в кодеsetup(). - Если в качестве условия остановки указать 0, то мотор не
остановится, а ранее заданное условие того же типа будет отменено, при
этом типы
MOT_REVиMOT_METприравнены. - Если на роторе мотора нет кольцевого магнита, или в модуле нет
датчиков Холла, тогда условие остановки с параметром
MOT_REVилиMOT_METбудет проигнорировано. - Проверить наличие магнита и датчиков Холла можно функцией
getMagnet().
- Пример:
mot.setStop() # Остановить мотор сразу (без условий). mot.setStop( 0.5, MOT_MET) # Остановить мотор через 0,5 метров пути. mot.setStop( 3.5, MOT_REV) # Остановить мотор через 3,5 оборота вала. mot.setStop( 6.5, MOT_SEC) # Остановить мотор через 6,5 секунд. mot.setStop( 0, MOT_MET) # Отменить заданную ранее остановку мотора по пройденному пути и количеству оборотов. mot.setStop( 0, MOT_REV) # Отменить заданную ранее остановку мотора по количеству оборотов и пройденному пути. mot.setStop( 0, MOT_SEC) # Отменить заданную ранее остановку мотора по времени.
Функция getStop()
- Назначение: Получение значения оставшегося до остановки.
- Синтаксис: getStop( ТИП )
- Параметр: ТИП - тип получаемого значения:
- MOT_REV - получить количество оборотов вала оставшихся до остановки.
- MOT_SEC - получить время оставшееся до остановки.
- MOT_MET - получить расстояние оставшееся до остановки.
- Возвращаемое значение: - одно из значений:
- Если тип задан значением MOT_REV, то функция возвращает количество оборотов оставшихся до остановки, от 0.01 до 167'772.15 полных оборотов.
- Если тип задан значением MOT_SEC, то функция возвращает время оставшееся до остановки, от 0,001 до 16'777,215 секунд.
- Если тип задан значением MOT_MET, то функция возвращает расстояние оставшееся до остановки в метрах.
- Примечание:
- Функция
getStop()возвращает значение оставшееся до остановки мотора, заданное ранее функциямиsetStop()илиsetSpeed(), того же типа. - Если тип условия остановки заданный функциями
setStop()илиsetSpeed()отличается от запрашиваемого типа, то функция возвращает значение рассчитанное с учётом текущей скорости вращения вала. Это значение может сильно отличаться от действительного, пока мотор не набрал заданную ему скорость. - Если запрошено расстояние оставшееся до остановки
MOT_MET, то до обращения к данной функции должен быть указан радиус колесаmot.radius=РАДИУС. Радиус указывается в мм, его можно указать однократно в кодеsetup(). - Если на роторе мотора нет кольцевого магнита, или в модуле нет
датчиков Холла, тогда функция сможет вернуть только время до остановки
MOT_SEC, при том что условие остановки так же было задано функциямиsetStop()илиsetSpeed()через времяMOT_SEC, иначе функция вернёт 0. - Проверить наличие магнита и датчиков Холла можно функцией
getMagnet().
- Функция
- Пример:
mot.setSpeed(100, MOT_RPM, 50, MOT_REV) # Запускаем мотор на скорости 100 об/мин с остановкой мотора после 50 полных оборотов.
while mot.getStop(MOT_REV): # Если до остановки ещё есть не пройденное количество оборотов.
print( mot.getStop(MOT_REV) ) # Выводим оставшееся оставшееся количество оборотов до остановки.
Функция setStopNeutral()
- Назначение: Установка нейтрального положения при остановке мотора.
- Синтаксис: setStopNeutral( ФЛАГ )
- Параметр: ФЛАГ - указывает переводить ротор в нейтральное положение при остановке.
- Возвращаемое значение: - результат применения данных.
- Примечание:
- Функция не останавливает мотор, а определяет его поведение при остановке.
- Если вызвать функцию с параметром
True, то при остановке мотор будет отключён, при этом ротор можно вращать, как при нейтральном положении машины. - Если вызвать функцию с параметром
False, то при остановке мотор будет застопорен, при этом ротор будет трудно вращать. - Выбранное состояние мотора будет применяется ко всем последующим остановкам.
- По умолчанию ротор можно вращать при остановке.
- Пример:
mot.setStopNeutral(True) # Указываем освободить мотор при его остановке. Ротор остановленного мотора можно вращать. mot.setStopNeutral(False) # Указываем не освобождать мотор при его остановке. Ротор остановленного мотора будет застопорен.
Функция getStopNeutral()
- Назначение: Получение установленного поведения мотора при остановке.
- Синтаксис: getStopNeutral()
- Параметр: Нет.
- Возвращаемое значение: ФЛАГ - наличия нейтрального положения при остановке.
- Примечание: Функция возвращает значение заданное ранее функцией
setStopNeutral(). - Пример:
i = mot.getStopNeutral()
Функция getSum()
- Назначение: Получение количества совершённых оборотов или пройденного пути.
- Синтаксис: getSum( ТИП )
- Параметр: ТИП - тип получаемого значения:
- MOT_REV - получить количество совершённых оборотов вала.
- MOT_MET - получить пройденное расстояние.
- Возвращаемое значение: - количество совершённых оборотов или
пройденный путь:
- Если тип задан значением MOT_REV, то функция возвращает количество совершённых оборотов с момента их сброса, от 0.01 до 167'772.15 полных оборотов.
- Если тип задан значением MOT_MET, то функция возвращает пройденный путь с момента его сброса в метрах
- Примечание:
- Функция
getSum()возвращает количество совершённых оборотов или пройденный путь с момента их сброса функциейdelSum(). - Количество совершённых оборотов и пройденный путь определяются по
показаниям с датчиков Холла, вне зависимости от того, как запущен мотор,
функцией
setSpeed()или его вал вращается по средством внешних сил, даже если мотор отключён. - Если запрошен пройденный путь
MOT_MET, то до обращения к данной функции должен быть указан радиус колесаmot.radius=РАДИУС. Радиус указывается в мм, его можно указать однократно в коде setup(). - Функция не будет работать если на роторе мотора нет кольцевого магнита, или в модуле нет датчиков Холла.
- Проверить наличие магнита и датчиков Холла можно функцией
getMagnet().
- Функция
- Пример:
i = mot.getSum( MOT_REV ) # Получить количество совершённых полных оборотов вала. j = mot.getSum( MOT_MET ) # Получить пройденный путь в метрах.
Функция delSum()
- Назначение: Сброс количества совершённых оборотов и пройденного пути.
- Синтаксис: delSum()
- Параметр: Нет.
- Возвращаемое значение: - результат сброса совершённых оборотов и пройденного пути.
- Примечание:
- Функция сбрасывает количество совершённых оборотов и пройденного
пути, которые можно получить функцией
getSum(). - Сброс количества совершённых оборотов и пройденного пути так же
осуществляется обращением к функциям
setStop()илиsetSpeed()вызванным с параметромMOT_REVилиMOT_MET.
- Функция сбрасывает количество совершённых оборотов и пройденного
пути, которые можно получить функцией
- Пример:
mot.delSum() # Сбросить количество совершённых оборотов и пройденный путь в 0.
Функция setDirection()
- Назначение: Установка направления вращения вала.
- Синтаксис: setDirection( ФЛАГ )
- Параметры:
- ФЛАГ - флаг вращения вала в прямом направлении.
- Если ФЛАГ установлен, то при положительных скоростях вал будет вращаться по часовой стрелке, а при отрицательных скоростях, против часовой стрелки.
- Если ФЛАГ сброшен, то при положительных скоростях вал будет вращаться против часовой стрелки, а при отрицательных скоростях, по часовой стрелке.
- Возвращаемое значение: - результат применения настройки.
- Примечание:
- Функцию удобно использовать при установке моторов на подвижные
механизмы, слева и справа. Если не обращаться к функции
setDirection()и задать двум моторам одинаковую скорость функциейsetSpeed(), то один мотор будет двигать механизм вперёд, а второй назад. Механизм будет разворачиваться на месте, как танк. - Если для правого мотора вызвать функцию
setDirection(True), а для левого мотораsetDirection(False), то задав положительную скорость обоим моторам, они будут двигать механизм в прямом направлении, а при отрицательных скоростях в обратном. - Функцию достаточно однократно вызвать в коде
setup()для каждого мотора. - По умолчанию установлено прямое направление вращения вала.
- Функцию удобно использовать при установке моторов на подвижные
механизмы, слева и справа. Если не обращаться к функции
- Пример:
mot1.setDirection(True) # Задаём прямое направление вращения. Вращение по ч.с. при положительных скоростях. mot2.setDirection(False) # Задаём обратное направление вращения. Вращение против ч.с. при положительных скоростях.
Функция getDirection()
- Назначение: Получение направления вращения вала.
- Синтаксис: getDirection()
- Параметр: Нет.
- Возвращаемое значение: - ФЛАГ вращения вала в прямом направлении.
- Если ФЛАГ == 1, то при положительных скоростях вал будет вращаться по часовой стрелке, а при отрицательных скоростях, против часовой стрелки.
- Если ФЛАГ == 0, то при положительных скоростях вал будет вращаться против часовой стрелки, а при отрицательных скоростях, по часовой стрелке.
- Пример:
if mot.getDirection() == True:
print("При положительных скоростях вал вращается по ч.с.")
else:
print("При положительных скоростях вал вращается против ч.с.")}
Функция getError()
- Назначение: Получение наличия ошибки модуля.
- Синтаксис: getError()
- Параметр: Нет.
- Возвращаемое значение: - может принимать следующие значения:
- 0 - модуль работает без ошибок.
- MOT_ERR_SPD - ошибка скорости. Ошибка возникает при отличии реальной
скорости от заданной функцией
setSpeed()с параметромMOT_RPMилиMOT_M_S. - MOT_ERR_DRV - ошибка драйвера. Ошибка возникает при перегрузке по току, перегреве чипа и при низком напряжении Vmot.
- Примечание:
- При наличии двух ошибок
MOT_ERR_SPDиMOT_ERR_DRV, будет возвращена первая. - Если на роторе мотора нет кольцевого магнита, или в модуле нет
датчиков Холла, тогда в качестве ошибки можно получить только ошибку
драйвера
MOT_ERR_DRV. - Проверить наличие магнита и датчиков Холла можно функцией
getMagnet().
- При наличии двух ошибок
- Пример:
i = mot.getError() # Получить ошибку модуля.
Функция getVoltage()
- Назначение: Получение номинального напряжения электродвигателя.
- Синтаксис: getVoltage()
- Параметр: Нет.
- Возвращаемое значение: - номинальное напряжение питания мотора в Вольтах.
- Примечание:
- Функция возвращает напряжение на которое рассчитан электродвигатель установленный в модуле, а не текущее напряжение на нём.
- Возвращаемое значение можно изменить функцией
setVoltage(), до отключения питания или перезагрузки модуля. Но это не изменит номинальное напряжение мотора. - Если обратиться к функции
setVoltage()указав любое значение, то функцияgetVoltage()будет возвращать не номинальное напряжение питания мотора, а указанное вами значение, до отключения питания или перезагрузки модуля.
- Пример:
i = mot.getVoltage() # Получить напряжение на которое рассчитан мотор.
Функция getNominalRPM()
- Назначение: Получение номинальной скорости вращения вала.
- Синтаксис: getNominalRPM()
- Параметр: Нет.
- Возвращаемое значение: - номинальная скорость вращения от 0 до 65'535 об.мин.
- Примечание:
- Функция возвращает номинальную скорость вращения вала редуктора. Скорость заявленную производителем при номинальном напряжении и 100% коэффициенте заполнения ШИМ.
- Возвращаемое значение можно изменить функцией
setNominalRPM(), до отключения питания или перезагрузки модуля. Но это не изменит номинальную скорость. - Если обратиться к функции
setNominalRPM()указав любое значение, то функцияgetNominalRPM()будет возвращать не номинальную скорость вращения, а указанное вами значение, до отключения питания или перезагрузки модуля.
- Пример:
i = mot.getNominalRPM() # Получить номинальную скорость вращения вала.
Функция getMagnet()
- Назначение: Получение количества полюсов многополюсного магнитного вала.
- Синтаксис: getMagnet()
- Параметр: Нет.
- Возвращаемое значение: КОЛИЧЕСТВО - значение от 1 до 255, или 0 - нет магнита.
- Примечание:
- Если функция вернула 0, значит на роторе мотора нет кольцевого
магнита, или в модуле отсутствуют датчики Холла. По этой причине модуль
не может отслеживать вращение вала, следовательно, функции:
setSpeed(),getSpeed(),setStop(),getStop()иgetSum()не будут работать с параметрами:MOT_RPM,MOT_M_S,MOT_METиMOT_REV, а функцияgetError()не будет возвращать ошибку скоростиMOT_ERR_SPD.
- Если функция вернула 0, значит на роторе мотора нет кольцевого
магнита, или в модуле отсутствуют датчики Холла. По этой причине модуль
не может отслеживать вращение вала, следовательно, функции:
- Пример:
i = mot.getMagnet() # Получаем сохранённое количество полюсов одной полярности.
Функция getReducer()
- Назначение: Получение передаточного отношения редуктора.
- Синтаксис: getReducer()
- Параметр: Нет.
- Возвращаемое значение: ОТНОШЕНИЕ - значение от 0.01 до 167'772.15.
- Пример:
i = mot.getReducer() # Получаем сохранённое передаточное отношение редуктора.
Функции библиотеки используемые для настройки:
Некоторые данные указываемые / получаемые следующими функциями хранятся в Flash памяти модуля, а значит сохраняются и после отключения питания:
Функция setInvGear()
- Назначение: Установка флагов инверсии механизма.
- Синтаксис: setInvGear( РЕДУКТОР, МОТОР )
- Параметры:
- РЕДУКТОР - флаг инверсии вращения редуктора. Флаг должен быть установлен если вал редуктора вращается в сторону противоположную вращению ротора мотора.
- МОТОР - флаг инверсии полярности мотора. Флаг должен быть установлен при обратном подключении выводов мотора, если ротор мотора вращается против ч.с.
- Возвращаемое значение: - результат применения новых данных.
- Примечание:
- Заданные значения не сохраняются в энергонезависимую память модуля.
- Функция может быть полезной, только при смене редуктора или мотора.
- По умолчанию установлены значения в соответствии с типом редуктора и способа подключения мотора в модуле.
- Пример:
mot.setInvGear(False, False) # Редуктор НЕ инвертирует направление вращения, ротор мотора вращается НЕ против часовой стрелки. mot.setInvGear(True , True ) # Редуктор инвертирует направление вращения, ротор мотора вращается против часовой стрелки.
Функция getInvGear()
- Назначение: Получение флагов инверсии механизма.
- Синтаксис: getInvGear()
- Параметр: Нет.
- Возвращаемое значение: БАЙТ - значение от 0 до 3.
- 0 - редуктор без инверсии вращения, ротор мотора вращается по ч.с.
- 1 - редуктор без инверсии вращения, ротор мотора вращается против ч.с.
- 2 - редуктор с инверсией вращения, ротор мотора вращается по ч.с.
- 3 - редуктор с инверсией вращения, ротор мотора вращается против ч.с.
- Примечание:
- Нулевой бит возвращаемого байта является флагом инверсии полярности мотора.
- Первый бит возвращаемого байта является флагом инверсии вращения редуктора.
- Пример:
InvReducer = mot.getInvGear() & (1 << 1) # Получаем флаг инверсии редуктора. InvMotor = mot.getInvGear() & (1 << 0) # Получаем Флаг инверсии полярности мотора.
Функция setFreqPWM()
- Назначение: Установка частоты ШИМ подаваемого на мотор.
- Синтаксис: setFreqPWM( ЧАСТОТА )
- Параметр: ЧАСТОТА - значение от 1 до 1000 Гц.
- Возвращаемое значение: - результат применения новой частоты.
- Примечание:
- Заданное значение сохраняется в энергонезависимую память модуля, при этом модуль не сохраняет значение повторно, если оно не изменилось.
- Функции задания скорости позволяют задавать уровень ШИМ (коэффициент заполнения) не влияя на частоту. А данная функция позволяет изменить частоту ШИМ (период следования импульсов) не влияя на уровень ШИМ.
- Частота по умолчанию 500 Гц.
- Пример:
mot.setFreqPWM(100) # Задаём частоту ШИМ равную 100 Гц.
Функция setError()
- Назначение: Установка процента максимального отклонения скорости до установки ошибки.
- Синтаксис: setError( ПРОЦЕНТ )
- Параметр: ПРОЦЕНТ - значение от 1 до 100.
- Возвращаемое значение: - результат сохранения нового процента отклонения.
- Примечание:
- Заданное значение сохраняется в энергонезависимую память модуля, при этом модуль не сохраняет значение повторно, если оно не изменилось.
- При отличии реальной скорости от заданной функцией
setSpeed()с параметромMOT_RPMилиMOT_M_Sна плате модуля включается красный светодиод, а функцияgetError()начинает возвращать ошибку скоростиMOT_ERR_SPD. Это происходит при отличии реальной скорости от заданной на указанный функциейsetError()процент. Меняя этот процент Вы меняете поведение светодиода и функцииgetError(). - Значение по умолчанию 10%
- Пример:
mot.setError(10) # Установить максимальное отклонение скорости до установки ошибки как 10%.
Функция setVoltage()
- Назначение: Установка значения возвращаемого функцией getVoltage().
- Синтаксис: setVoltage( НАПРЯЖЕНИЕ )
- Параметр: НАПРЯЖЕНИЕ - значение от 0,0 до 25,5.
- Возвращаемое значение: - результат сохранения нового значения.
- Примечание:
- Заданное значение не сохраняется в энергонезависимую память модуля.
- Заданное значение не влияет на реальное номинальное напряжение мотора.
- Значение по умолчанию зависит от типа мотора установленного в модуле.
- Пример:
mot.setVoltage(9.2) # Установить значение которое будет возвращать функция getVoltage() до отключения питания.
Функция setNominalRPM()
- Назначение: Установка значения возвращаемого функцией getNominalRPM().
- Синтаксис: setNominalRPM( СКОРОСТЬ )
- Параметр: СКОРОСТЬ - значение от 0 до 65'535 об.мин.
- Возвращаемое значение: - результат сохранения нового значения.
- Примечание:
- Заданное значение не сохраняется в энергонезависимую память модуля.
- Заданное значение не влияет на реальную номинальную скорость вращения.
- Значение по умолчанию зависит от типа мотора и редуктора в модуле.
- Пример:
mot.setNominalRPM(1000) # Установить значение которое будет возвращать функция getNominalRPM() до отключения питания.
Функция setMagnet()
- Назначение: Установка количества полюсов многополюсного магнитного вала.
- Синтаксис: setMagnet( КОЛИЧЕСТВО )
- Параметр: КОЛИЧЕСТВО - значение от 1 до 255, или 0 - нет магнита.
- Возвращаемое значение: - результат сохранения нового количества полюсов.
- Примечание:
- Заданное значение не сохраняется в энергонезависимую память модуля.
- В качестве параметра указывается количество полюсов одной полярности.
- Функция может быть полезной, только при смене магнитного вала.
- Магнитный вал закреплён на роторе мотора возле датчиков Холла, по показаниям которого определяется скорость.
- Если вызвать функцию с параметром 0 (указать что на роторе мотора
нет магнита), то функции:
setSpeed(),getSpeed(),setStop(),getStop()иgetSum()не будут работать с параметрами:MOT_RPM,MOT_M_S,MOT_METиMOT_REV, а функцияgetError()не будет возвращать ошибку скоростиMOT_ERR_SPD. - Значение по умолчанию зависит от магнита установленного на ротор мотора.
- Пример:
mot.setMagnet(7) # Указываем что магнитный вал содержит 7 полюсов одной полярности.
Функция setReducer()
- Назначение: Установка передаточного отношения редуктора.
- Синтаксис: setReducer( ОТНОШЕНИЕ )
- Параметр: ОТНОШЕНИЕ - значение от 0.01 до 167'772.15.
- Возвращаемое значение: - результат сохранения нового передаточного отношения.
- Примечание:
- Заданное значение не сохраняется в энергонезависимую память модуля.
- Если указать отношение равное 1, значит редуктор отсутствует.
- Если указать значение выше 1, значит редуктор понижающий.
- Если указать значение меньше 1, значит редуктор повышающий.
- Функция может быть полезной, только при смене редуктора.
- Значение по умолчанию зависит от типа редуктора установленного в модуле.
- Пример:
mot.setReducer(49.2) # Указываем передаточное отношение редуктора как 1:49.2
Функция changeBus()
- Назначение: Установка шины I2C
- Синтаксис: changeBus( ПУТЬ К ФАЙЛУ ШИНЫ )
- Параметр:
- ПУТЬ К ФАЙЛУ ШИНЫ - строка
- Возвращаемые значения: Нет.
- Примечание:
- Пример:
# Меняем шину
mot.changeBus("/dev/i2c-3")

Обсуждение