


 |
 |
Общие сведения:
Модуль - Драйвер моторов с управляющим контроллером, I2C-flash - является драйвером коллекторных моторов с управлением по шине I2С.
Модуль относится к серии «Flash», а значит к одной шине I2C можно подключить более 100 модулей, так как их адрес на шине I2C (по умолчанию 0x09), хранящийся в энергонезависимой памяти, можно менять программно.
Для запуска мотора достаточно передать модулю число, определяющее коэффициент заполнения ШИМ от 0 до ±100%, значение определяет скорость, а знак, направление вращения мотора.
Модуль позволяет блокировать (стопорить) и освобождать вал остановленного (останавливаемого) мотора. В первом случае остановка мотора осуществляется с резким торможением и последующим удержанием вала, а во втором, торможение осуществляется плавно, по инерции, без удержания вала.
Модуль может получать данные с магнитного или оптического энкодера установленного на ротор мотора. В таком случае модулю нужно задать количество магнитов или оптических щелей энкодера. После чего скорость можно задавать не только коэффициентом заполнения ШИМ, но и количеством полных оборотов в минуту. Наличие энкодера позволит не только задавать скорость, но и получать реальную скорость вала и количество совершённых оборотов, даже если он вращается посредством внешних сил. Если на роторе мотора установлен редуктор, то модулю нужно указать его передаточное отношение.
Видео:
Спецификация:
- Напряжение питания логики: 5 В (номинально), или 3,3 В.
- Диапазон напряжений мотора поддерживаемый драйвером: 2,7 В ... 12 В.
- Максимальный ток мотора поддерживаемый драйвером: до 3 А (пиковый ток до 4 А).
- Драйвер оснащён защитой от перегрева и перегрузки по току.
- Интерфейс: I2C.
- Скорость шины I2C: 100 кбит/с.
- Адрес на шине I2C: устанавливается программно (по умолчанию 0x09).
- Уровень логической 1 на линиях шины I2C: Vcc.
- Уровень логической 1 сигналов с энкодера: Vcc.
- Рабочая температура: от -20 до +70 °С.
- Габариты: 45 х 25 мм.
- Вес: 7 г.

Подключение:
Перед подключением модуля ознакомьтесь с разделом "Смена адреса модуля на шине I2C" в данной статье.
Назначение разъёмов модуля:
Разъем из 4 выводов шины I2C (используется для подключения модуля к Arduino).
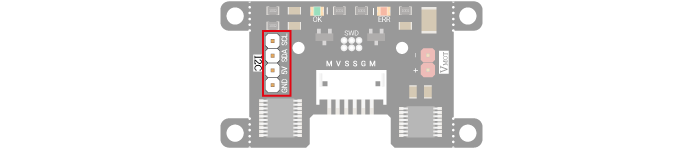
- SCL - вход/выход линии тактирования шины I2C.
- SDA - вход/выход линии данных шины I2C.
- 5V - вход питания +5 В (номинально), или 3,3 В.
- GND - общий вывод питания (соединён с выводом питания мотора -VMOT).
Разъем из 2 выводов используется для подключения проводов питания мотора.
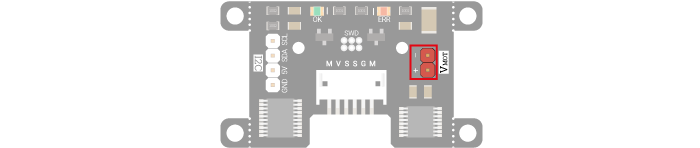
- +VMOT - вход питания мотора от +2,7 В до +12 В.
- -VMOT - общий вывод питания (соединён с выводом GND).
Разъем из 6 выводов используется для подключения мотора и энкодера.

- Выходы модуля M, M (Motor) используются для питания мотора.
- Входы модуля S,S (Signal) подключаются к выходам оптопар или датчиков Холла энкодера.
- Выходы модуля G, V (GND, Vcc) используются для питания энкодера.
Если у мотора нет энкодера, то выводы G (GND), V (Vcc), S, S (Signal) не используются.
Энкодер: устройство позволяющее определять наличие и направление поворотов. На моторах, чаще всего, устанавливают оптические или магнитные энкодеры. Оптический энкодер состоит из двух оптопар и щелевого диска. Магнитный энкодер состоит из двух датчиков Холла и магнитного диска. Диск (магнитный или щелевой) устанавливается на валу ротора мотора.
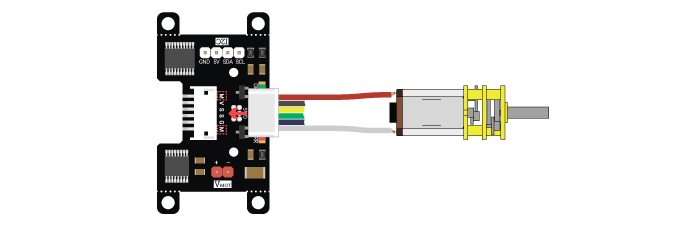
Подключение мотора без энкодера:
- При подключении мотора без энкодера используются только выводы M (Motor).
- Выводы G (GND), V (Vcc), S, S (Signal) остаются не задействованы.
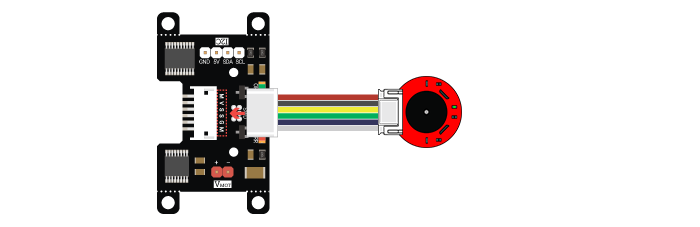
Подключение мотора GM12-N20:
Подключение мотора с энкодером:
- Для подключения мотора используются выводы M.
- Для подключения энкодера используются выводы G (GND), V (Vcc), S, S (Signal).
Подключение мотора GM12-N20:
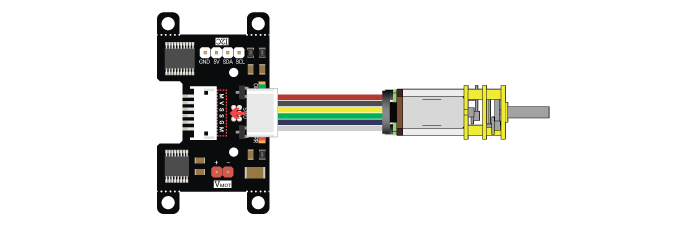
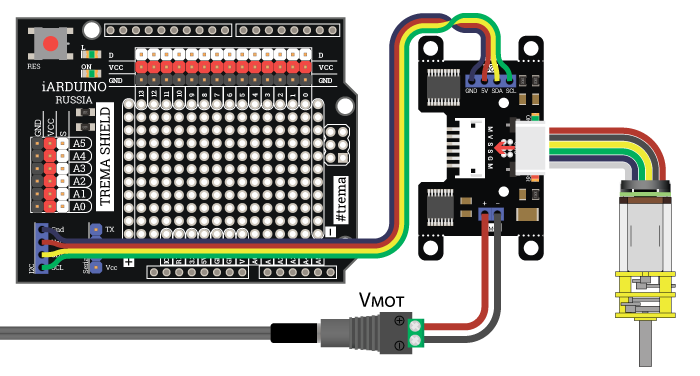
Подключение мотора 25MM 620RPM:
- Выходы модуля G, V (GND, Vcc) используются для питания энкодера.
- Входы модуля S, S (Signal) подключаются к выходам оптопар или датчиков Холла энкодера.
Подключение модуля к управляющей плате:
Модуль подключается к аппаратной или программной шине I2C Arduino. В комплекте имеется кабель для быстрого и удобного подключения модуля к колодке I2C на Trema Shield. Если на шине I2C уже имеется другое устройство, то для подключения модуля, предлагаем воспользоваться I2C Hub.
Питание:
Входное напряжение питания модуля 5В (номинально), или 3,3 В постоянного тока, подаётся на выводы 5V и GND.
Входное напряжение питания мотора от 2,7В до 12В постоянного тока, подаётся на выводы +VMOT и -VMOT.
Подробнее о модуле:
Модуль построен на базе микроконтроллера STM32F030F4, драйвера DRV8833 и снабжен собственным стабилизатором напряжения. Модуль способен поддерживать заданную скорость и направление вращения вала, сверяясь с показаниями энкодера. На плате модуля имеется красный светодиод информирующий об отличии реальной скорости от заданной.
Модуль без энкодера позволяет:
- Менять свой адрес на шине I2C.
- Управлять внутренней подтяжкой линий шины I2C (по умолчанию включена).
- Указывать борт установки модуля (модуль левого колеса / модуль правого колеса).
- Задавать скорость вращения вала от 0 до ±100%, при этом знак определяет направление.
- Останавливать двигатель и/или указать тип его остановки. Двигатель может быть остановлен двумя способами: отключением мотора (свободный ход) или торможением (стопор).
Заданный тип применяется ко всем последующим остановкам двигателя. - Останавливать двигатель по истечении заданного времени.
- Определять наличие ошибки драйвера (перегрузка по току, перегрев, низкое напряжение).
Модуль с энкодером дополнительно позволяет:
- Указывать передаточное отношение редуктора мотора.
- Указывать количество магнитов или оптических щелей энкодера.
- Задавать скорость вращения вала, указав количество оборотов в минуту или метров в секунду. Во всех случаях можно указывать отрицательные значения для вращения в обратную сторону.
- Получать флаг отличия заданной скорости вращения вала от реальной, а так же указывать процент отклонения при котором будет устанавливаться данный флаг. На плате модуля имеется красный светодиод, который дублирует состояние этого флага.
- Узнавать текущую скорость вращения вала.
Скорость вращения вала определяется по показаниям энкодера, даже если мотор отключён, а вал вращается по средством внешних сил. - Узнавать количество совершённых полных оборотов вала.
Количество оборотов вала определяется по показаниям энкодера, даже если мотор отключён, а вал вращается по средством внешних сил. - Остановить двигатель по истечении заданного количества полных оборотов вала. А зная размеры колеса, можно остановить двигатель по прохождении указанного расстояния.
Специально для работы с модулем - Драйвер моторов с управляющим контроллером, I2C-flash, нами разработана библиотека iarduino_I2C_Motor которая позволяет реализовать все функции модуля.
Подробнее про установку библиотеки читайте в нашей инструкции.
Смена адреса модуля на шине I2C:
По умолчанию все модули FLASH-I2C имеют установленный адрес 0х09. Если вы планируете подключать более 1 модуля на шину I2C, необходимо изменить адреса модулей таким образом, чтобы каждый из них был уникальным. Более подробно о том, как изменить адрес, а также о многом другом, что касается работы FLASH-I2C модулей, вы можете прочесть в этой статье.
Настройка модуля:
Настройка модуля заключается в указании параметров энкодера и редуктора.
Настройка модуля на работу мотора без энкодера:
Если драйвер работает с мотором без энкодера, то необходимо сбросить количество магнитов энкодера и указать состояние флагов инверсии вращения. Дополнительно можно указать способ остановки мотора (с освобождением или блокировкой вала).
#include <Wire.h> // Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_Motor.
#include <iarduino_I2C_Motor.h> // Подключаем библиотеку для работы с мотором I2C-flash.
iarduino_I2C_Motor mot(0x09); // Создаём объект mot для работы с функциями и методами библиотеки iarduino_I2C_Motor, указывая адрес модуля на шине I2C.
// Если объявить объект без указания адреса (iarduino_I2C_Motor mot;), то адрес будет найден автоматически.
void setup(){ //
mot.begin(&Wire); // Инициируем работу с мотором, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire).
mot.setMagnet(0); // Указываем что энкодер отсутствует.
mot.setInvGear(false, false); // Редуктор НЕ инвертирует направление вращения, ротор мотора вращается НЕ против часовой стрелки.
mot.setStopNeutral(true); // Указываем освободить мотор при его остановке. Ротор остановленного мотора можно вращать.
} //
//
void loop(){ //
mot.setSpeed( 50, MOT_PWM); delay(5000); // Запускаем мотор на скорости 50% и ждём 5 секунд.
mot.setStop(); delay(5000); // Останавливаем мотор и ждём 5 секунд.
mot.setSpeed(-50, MOT_PWM); delay(5000); // Запускаем мотор на скорости -50% и ждём 5 секунд.
mot.setStop(); delay(5000); // Останавливаем мотор и ждём 5 секунд.
} //
- Настройку модуля достаточно выполнить один раз в коде функции
setup(). - Функция
begin()инициирует работу с модулем. - Функция
setMagnet()позволяет задать количество магнитов или оптических щелей энкодера. Так как данный пример демонстрирует настройку модуля на работу мотора без энкодера, то функция вызывается с параметром0- нет магнита или оптических щелей на валу энкодера. - Функция
setInvGear()позволяет настроить инверсии вращения вала. - Первый параметр функции устанавливается в
trueесли выходной вал редуктора вращается в сторону противоположную вращению ротора мотора. - Второй параметр функции устанавливается в
trueесли ротор мотора вращается против часовой стрелки, при положительных скоростях. - Функция
setStopNeutral()позволяет определить поведение вала при остановке. Если остановка должна быть плавной, то указываетсяtrue, иначеfalse. - В коде функции
loop()демонстрируется работа модуля. - Функция
setSpeed()задаёт скорость и направление вращения мотора, а функцияsetStop()останавливает мотор. - Если модуль настроен правильно, то выходной вал редуктора будет вращаться по часовой стрелке при положительных скоростях.
Настройка модуля на работу мотора с энкодером:
Если драйвер работает с мотором и энкодером, то необходимо указать количество магнитов энкодера, состояние флагов инверсии вращения и передаточное отношение редуктора. Дополнительно можно указать способ остановки мотора (с освобождением или блокировкой вала) и процент отклонения скорости до установки ошибки.
#include <Wire.h> // Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_Motor.
#include <iarduino_I2C_Motor.h> // Подключаем библиотеку для работы с мотором I2C-flash.
iarduino_I2C_Motor mot(0x09); // Создаём объект mot для работы с функциями и методами библиотеки iarduino_I2C_Motor, указывая адрес модуля на шине I2C.
// Если объявить объект без указания адреса (iarduino_I2C_Motor mot;), то адрес будет найден автоматически.
void setup(){ //
mot.begin(&Wire); // Инициируем работу с мотором, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire).
mot.setMagnet(7); // Указываем что энкодер установленный на роторе мотора содержит 7 магнитов или 7 оптических щелей.
mot.setInvGear(false, false); // Редуктор НЕ инвертирует направление вращения, ротор мотора вращается НЕ против часовой стрелки.
mot.setReducer(10.0); // Указываем передаточное отношение редуктора 10.0 = 1:10. Если редуктора нет, то указывается 1.0 = 1:1.
mot.setStopNeutral(true); // Указываем освободить мотор при его остановке. Ротор остановленного мотора можно вращать.
mot.setError(20); // Указываем устанавливать ошибку при отклонении заданной скорости от реальной более чем на 20%.
} //
//
void loop(){ //
mot.setSpeed( 120, MOT_RPM); delay(5000); // Запускаем мотор на скорости 120 об/мин и ждём 5 секунд.
mot.setStop(); delay(5000); // Останавливаем мотор и ждём 5 секунд.
mot.setSpeed(-120, MOT_RPM); delay(5000); // Запускаем мотор на скорости -120 об/мин и ждём 5 секунд.
mot.setStop(); delay(5000); // Останавливаем мотор и ждём 5 секунд.
} //
- Настройку модуля достаточно выполнить один раз в коде функции
setup(). - Функция
begin()инициирует работу с модулем. - Функция
setMagnet()позволяет задать количество магнитов или оптических щелей энкодера. В данном примере указано7магнитов или оптических щелей. - Функция
setInvGear()позволяет настроить инверсии вращения вала.- Первый параметр функции устанавливается в
trueесли выходной вал редуктора вращается в сторону противоположную вращению ротора мотора. - Второй параметр функции устанавливается в
trueесли ротор мотора вращается против часовой стрелки, при положительных скоростях.
- Первый параметр функции устанавливается в
- Функция
setReducer()позволяет указать передаточное отношение редуктора, от 1:0,01до 1:167'772,15. В данном примере указано 1:10,0. - Функция
setStopNeutral()позволяет определить поведение вала при остановке. Если остановка должна быть плавной, то указываетсяtrue, иначеfalse. - Функция
setError()позволяет задать процент максимального отклонения скорости до установки ошибки. В данном примере, если заданная скорость будет отличаться от реальной более чем на20%, то установится флаг ошибки, а на плате включится красный светодиод. - В коде функции
loop()демонстрируется работа модуля. - Функция
setSpeed()задаёт скорость и направление вращения мотора, а функцияsetStop()останавливает мотор. - Если модуль настроен правильно, то выходной вал редуктора будет вращаться по часовой стрелке при положительных скоростях.
Настройка модуля при помощи регистров:
Карта всех регистров модуля с их подробным описанием доступна на странице Wiki - Мотор-редуктор с управляющим контроллером, I2C-flash - Datasheet.
- В предыдущих разделах модуль был настроен при помощи функций:
setMagnet(),setInvGear(),setReducer()иsetError(). - Работа модуля была продемонстрирована функциями
setSpeed()иsetStop(). - Функция
setMagnet()записывает значение параметра в регистр0x11 «MAGNET». - Функция
setInvGear()записывает значение параметров в регистр0x25 «BITS_2». - Функция
setReducer()записывает значение параметра в регистры0x12-14 «REDUCER». - Функция
setStopNeutral()сохраняет бит поведения вала при остановке в регистр«STOP». - Функция
setError()записывает значение параметра в регистр0x0A «MAX_RPM_DEV». - Функция
setSpeed()записывает значение в регистры«SET_PWM»или«SET_RPM». - Функция
setStop()устанавливает бит остановки в регистре0x24 «STOP»или записывает условие остановки в регистры0x1E-20 «STOP_REV», или0x21-23 «STOP_TMR».
Следующий пример выполняет те же действия, что и пример из раздела «Настройка модуля на работу мотора с энкодером», но без использования библиотеки iarduino_I2C_Motor.
#include <Wire.h> // Подключаем библиотеку Wire для работы с шиной I2C.
const int ADDRESS = 0x09; // Адрес модуля на шине I2C.
const int REG_DEV = 0x0A; // Адрес регистра «MAX_RPM_DEV» содержащего максимальный % отклонения скорости.
const int REG_MAG = 0x11; // Адрес регистра «MAGNET» содержащего количество магнитов или оптических щелей энкодера.
const int REG_RED = 0x12; // Адрес младшего байта регистра «REDUCER» содержащего передаточное отношение редуктора.
const int REG_RPM = 0x17; // Адрес младшего байта регистра «SET_RPM» задающего скорость вращения вала через обороты в минуту.
const int REG_STP = 0x24; // Адрес регистра «STOP» содержащего биты остановки вала.
const int REG_BIT = 0x25; // Адрес регистра «BITS_2» содержащего биты инверсии направления вращения.
//
void setup(){ //
Wire.setClock(100000L); // Устанавливаем скорость передачи данных по шине I2C.
Wire.begin(); // Инициируем работу c шиной I2C в качестве мастера.
// setMagnet(7): //
Wire.beginTransmission(ADDRESS); // Инициируем передачу данных.
Wire.write( REG_MAG ); // Указываем адрес регистра.
Wire.write( 7 ); // Указываем значение для записи в регистр.
Wire.endTransmission(); // Выполняем инициированную ранее передачу данных.
delay(10); // Добавляем задержку между пакетами.
// setInvGear(false, false): //
Wire.beginTransmission(ADDRESS); // Инициируем передачу данных.
Wire.write( REG_BIT ); // Указываем адрес регистра.
Wire.write( 0 ); // Указываем значение для записи в регистр.
Wire.endTransmission(); // Выполняем инициированную ранее передачу данных.
delay(10); // Добавляем задержку между пакетами.
// setReducer(10.0): //
Wire.beginTransmission(ADDRESS); // Инициируем передачу данных.
Wire.write( REG_RED ); // Указываем адрес регистра.
Wire.write(((uint32_t)10*100)>>0); // Указываем значение для записи в младший байт регистра.
Wire.write(((uint32_t)10*100)>>8); // Указываем значение для записи в средний байт регистра.
Wire.write(((uint32_t)10*100)>>16);// Указываем значение для записи в старший байт регистра.
Wire.endTransmission(); // Выполняем инициированную ранее передачу данных.
delay(10); // Добавляем задержку между пакетами.
// setError(20): //
Wire.beginTransmission(ADDRESS); // Инициируем передачу данных.
Wire.write( REG_DEV ); // Указываем адрес регистра.
Wire.write( 20 ); // Указываем значение для записи в регистр.
Wire.endTransmission(); // Выполняем инициированную ранее передачу данных.
delay(10); // Добавляем задержку между пакетами.
} //
//
void loop(){ //
// setSpeed( 120, MOT_RPM): //
Wire.beginTransmission(ADDRESS); // Инициируем передачу данных.
Wire.write( REG_RPM ); // Указываем адрес регистра.
Wire.write( (uint8_t)( 120 >> 0)); // Указываем значение для записи в младший байт регистра.
Wire.write( (uint8_t)( 120 >> 8)); // Указываем значение для записи в старший байт регистра.
Wire.endTransmission(); // Выполняем инициированную ранее передачу данных.
delay(5000); // Ждём 5 секунд, для наблюдения за скоростью и направлением.
// setStop(): //
Wire.beginTransmission(ADDRESS); // Инициируем передачу данных.
Wire.write( REG_STP ); // Указываем адрес регистра.
Wire.write( 0b00000011 ); // Указываем значение для записи в регистр.
Wire.endTransmission(); // Выполняем инициированную ранее передачу данных.
delay(5000); // Ждём 5 секунд, для наблюдения за остановкой.
// setSpeed(-120, MOT_RPM): //
Wire.beginTransmission(ADDRESS); // Инициируем передачу данных.
Wire.write( REG_RPM ); // Указываем адрес регистра.
Wire.write( (uint8_t)(-120 >> 0)); // Указываем значение для записи в младший байт регистра.
Wire.write( (uint8_t)(-120 >> 8)); // Указываем значение для записи в старший байт регистра.
Wire.endTransmission(); // Выполняем инициированную ранее передачу данных.
delay(5000); // Ждём 5 секунд, для наблюдения за скоростью и направлением.
// setStop(): //
Wire.beginTransmission(ADDRESS); // Инициируем передачу данных.
Wire.write( REG_STP ); // Указываем адрес регистра.
Wire.write( 0b00000011 ); // Указываем значение для записи в регистр.
Wire.endTransmission(); // Выполняем инициированную ранее передачу данных.
delay(5000); // Ждём 5 секунд, для наблюдения за остановкой.
} //
Если для остановки мотора записывать в регистр REG_STP значение 0b00000010, то мотор будет останавливаться резко, в отличии от плавной остановки записью значения 0b00000011.
Примеры работы с модулем:
Примеры работы с модулем при помощи библиотеки iarduino_I2C_Motor и описание всех её функций, доступны на странице Wiki - Мотор-редуктор с управляющим контроллером, FLASH-I2C.
Сама библиотека содержит больше примеров, доступных из меню Arduino IDE: Файл / Примеры / iarduino I2C Motor (мотор).
Функции setSpeed(), getSpeed(), setStop() и getSum(), вызванные с параметрами MOT_RPM, MOT_M_S, MOT_MET и MOT_REV поддерживаются только модулем с установленным энкодером.
Ссылки:
- Драйвер моторов с управляющим контроллером, FLASH-I2C.
- Модуль - Мотор-редуктор с управляющим контроллером, I2C-flash.
- Wiki - Мотор-редуктор с управляющим контроллером, FLASH-I2C.
- Wiki - Мотор-редуктор с управляющим контроллером, I2C-flash - Datasheet.
- Библиотека iarduino_I2C_Motor.
- Библиотека iarduino_I2C_Software.
- Wiki - Расширенные возможности библиотек iarduino для шины I2C.
- Wiki - Установка библиотек в Arduino IDE.
- Wiki - Программная установка адресов модулей FLASH-I2C.

Обсуждение