

")
Общие сведения:
Trema-модуль Bluetooth HC-05 - это модуль беспроводной связи позволяющий передавать и принимать данные по радиоканалу на разрешённом ISM (Industry, Science and Medicine) диапазоне частот, от 2.4 ГГц до 2.5 ГГц, предназначенном для использования в индустриальных, научных и медицинских целях, используя метод AFH (Adaptive Frequency Hopping Feature) - адаптивной скачкообразной перестройки несущей частоты.
Видео:
Спецификация:
- Напряжение питания: 3,3 ... 5 В
- Потребляемый ток при подключении: до 40 мА (поиск, сопряжение, подключение к другим Bluetooth устройствам)
- Потребляемый ток при передаче данных: до 8 мА
- Частотный диапазон: ISM 2,4 ... 2,48 ГГц
- Мощность передатчика: до +4 дБм
- Чувствительность приёмника: -80 дБм
- Дальность связи: 10 м
- Интерфейс: UART (с программируемой скоростью передачи данных)
- Максимальное напряжение на выводах TX и RX не должно превышать напряжение питания модуля.
- PIN-код по умолчанию: 1234 (у некоторых модулей 0000)
- Настройки UART по умолчанию: Скорость 38400 бит/сек, 8 бит данных, 1 стоп бит, без проверки чётности, с контролем данных.
- Поддерживаемые скорости UART: 9600,19200,38400,57600,115200,230400,460800 бит/сек.
- Рабочая температура: -25 ... +75 °C
Все модули линейки "Trema" выполнены в одном формате

Подключение:
Trema Bluetooth модуль HC-05 подключается к Arduino по шине UART (можно использовать как аппаратную так и программную шину).
- Вывод модуля TX подключается к аппаратному (фиксированному) или программному (назначенному) выводу RX Arduino. Это линия шины UART для передачи данных от модуля к Arduino.
- Вывод модуля RX подключается к аппаратному (фиксированному) или программному (назначенному) выводу TX Arduino. Это линия шины UART для передачи данных в модуль от Arduino.
- Вывод модуля K подключается к любому выводу Arduino номер которого указывается в скетче. Это линия перевода модуля в режим AT-команд. Модуль в обычном режиме будет воспринимать AT-команды, только после того как на этот вывод кратковременно подать высокий уровень. Модуль перейдёт в режим AT-команд (на скорости 38400 бит/с и не будет соединяться с другими модулями) если на нём будет установлен высокий логический уровень при подаче питания или перезагрузке.
Модуль удобно подключать 3 способами, в зависимости от ситуации:
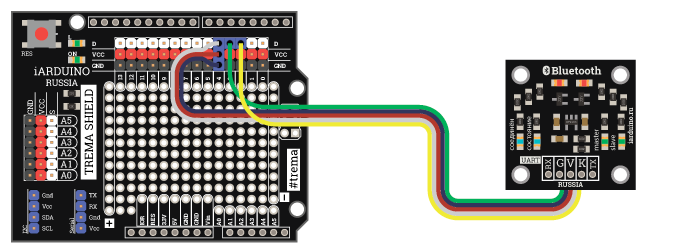
Способ - 1 : Используя проводной шлейф и Piranha UNO
Используя провода «Папа — Мама», подключаем напрямую к контроллеру Piranha UNO.

Способ - 2 : Используя Trema Set Shield
Модуль можно подключить к UART входу Trema Set Shield.

Способ - 3 : Используя проводной шлейф и Shield
Используя 2-х и 3-х проводные шлейфы, к Trema Shield, Trema-Power Shield, Motor Shield, Trema Shield NANO и тд.
Trema Bluetooth модуль HC-05 можно подключить и непосредственно к компьютеру (через адаптер USB-UART), передавая AT-команды из программ терминалов, о том как это сделать описано в разделе Wiki AT-команды Bluetooth.
Питание:
Входное напряжение питания 3,3 или 5 В постоянного тока, подаётся на выводы Vcc и GND модуля.
Подробнее о модуле:
В ISM диапазоне частот работают и радио модули nRF24L01+, но в отличии от этих модулей, которые работают на определённой частоте диапазона, Trema-модуль Bluetooth HC-05 используют метод AFH (Adaptive Frequency Hopping Feature) адаптивной скачкообразной перестройки несущей частоты (он меняет свою частоту 1600 раз в секунду). Несущая частота меняется псевдослучайным образом и заранее известна только паре «ведущий - ведомый», что обеспечивает не только устойчивость к помехам (занят канал? не беда, перейдём на другой) но и сохранение конфиденциальности передаваемых данных.
Преимуществом Bluetooth модулей перед другими модулями беспроводной передачи данных заключается в простоте работы (Вам не нужно знать протоколы, работать с регистрами, отслеживать сигналы и т.д.) и широкой распространённости данного типа передачи данных (Вы можете управлять Вашими устройствами, или получать их показания, практически с любого телефона, планшета, ноутбука).
Модуль не требует подключения антенны, т.к. она встроена (присутствует на ПП модуля).
В роли ведомого, Trema Bluetooth модуль HC-05 поддерживает метод автоматического сопряжения (создание пары) с другими Bluetooth устройствами выступающими в роли ведущих и инициировавших сопряжение.
Trema Bluetooth модуль HC-05 поддерживает автоматическое переподключение к последнему устройству (если информация о сопряжении с ним не была стёрта пользователем из списка пар). Если Вы установили подключение к другому Bluetooth устройству и связь с ним пропала (отключилось питание, увеличилось расстояние и т.д.), то после устранения причины пропадания связи, устройства вновь будут готовы передавать/принимать данные, без Вашего вмешательства.
Trema Bluetooth модуль HC-05, в отличие от Bluetooth модулей HC-06, может работать не только в роли ведомого (slave), ожидая подключение, но и в роли ведущего (Master), инициируя поиск (обнаружение), сопряжение и подключение к другим Bluetooth модулям находящимся в радиусе действия. Модуль способен принимать и отправлять данные как в роли ведущего (master), так и в роли ведомого (slave).
Используя Trema Bluetooth модули HC-05 можно создавать связь между двумя Arduino, или между Arduino и другими устройствами, как ведущими (телефон, планшет, компьютер, ...), так и ведомыми (гарнитуры, клавиатуры, мышки, ...).
Специально для Trema Bluetooth модуль HC-05 нами разработана библиотека iarduino_Bluetooth_HC05 которая значительно упрощает процесс поиска любых Bluetooth устройств, создания ролей (master/slave) и сопряжения. Поиск и подключение к другим модулям Bluetooth осуществляется по их именам а не адресам. При использовании библиотеки для связи двух Trema Bluetooth модулей HC-05 можно передавать строки, значения и массивы любых типов, при этом библиотека осуществляет проверку доставки данных используя циклически избыточный код, так что Trema Bluetooth модуль HC-05 передавший данные получает подтверждение приёма, а Trema Bluetooth модуль HC-05 получивший данные может оперировать информацией о количестве элементов массива и его размере.
Подробнее про установку библиотеки читайте в нашей инструкции..
Примеры:
Trema Bluetooth модуль в роли ведомого (Slave) принимает данные:
Связь осуществляется между двумя Trema Bluetooth модулями HC-05 использующими библиотеку iarduino_Bluetooth_HC05. Скетч модуля исполняющего роль master приведён в следующем примере.
#include <SoftwareSerial.h> // Подключаем библиотеку SoftwareSerial для общения с модулем по программной шине UART
#include <iarduino_Bluetooth_HC05.h> // Подключаем библиотеку iarduino_Bluetooth_HC05 для работы с Trema Bluetooth модулем HC-05
SoftwareSerial softSerial(2,3); // Создаём объект softSerial указывая выводы RX, TX (можно указывать любые выводы Arduino UNO). Вывод 2 Arduino подключается к выводу TX модуля, вывод 3 Arduino подключается к выводу RX модуля
iarduino_Bluetooth_HC05 hc05(4); // Создаём объект hc05 указывая любой вывод Arduino, который подключается к выводу K модуля
int myArray[3]; // Объявляем массив в который будем получать данные, можно создавать массивы или переменные любых типов в .т.ч и char
//
void setup(){ //
Serial.begin (9600); // Инициируем передачу данных по аппаратной шине UART для вывода результата в монитор последовательного порта
Serial.print ("begin: "); // Выводим текст "begin: " в монитор последовательного порта
if( hc05.begin(softSerial) ) {Serial.println("Ok");} // Инициируем работу с Trema модулем hc05, указывая объект softSerial через который осуществляется связь по шине UART
else {Serial.println("Error");} // Если работа с модулем не инициирована, то выводим сообщение об ошибке
Serial.print ("create slave: "); // Выводим текст "create slave: " в монитор последовательного порта
if( hc05.createSlave("MyName","4567") ) {Serial.println("Ok");} // Создаем ведомую роль модулю, указывая его имя и pin-код (в примере имя = "MyName", pin-код = "4567")
else {Serial.println("Error");} // Если роль не создалась - выводим сообщение об ошибке
} //
//
void loop (){ //
if(hc05.available()){ // Если есть принятые данные, то ...
hc05.read(myArray); // Читаем полученные данные в ранее объявленный массив myArray
Serial.println(myArray[0]); // Выводим 0 элемент массива myArray в монитор последовательного порта
Serial.println(myArray[1]); // Выводим 1 элемент массива myArray в монитор последовательного порта
Serial.println(myArray[2]); // Выводим 2 элемент массива myArray в монитор последовательного порта
} // Функции available() и read() работают только при приёме данных от внешнего Trema Bluetooth модуля использующего данную библиотеку!
} // Если передача данных выполняется другим Bluetooth модулем, то приём данных осуществляется посимвольным чтением данных из UART
Инициализация модуля hc05.begin(); и создание ведомой роли hc05.createSlave(); может занять несколько секунд.
В этом примере модуль подключается через программный UART используя библиотеку SoftwareSerial, а при инициализации работы с модулем hc05.begin() указывается объект softSerial. Но модуль можно подключать и к аппаратному UART, тогда при инициализации работы с модулем hc05.begin() нужно указать Serial или Serial1, Serial2, Serial3, см. пример подключения к Arduino Mega.
При использовании Trema Bluetooth модуля HC-05 в качестве ведомого можно однократно вызвать функцию createSlave() с указанием имени и pin кода, после чего навсегда исключить эту функцию из кода. Тогда, при подаче питания, Trema Bluetooth модуля HC-05 будет стартовать в режиме ведомого и соединяться с первым ведущим который правильно укажет имя и pin ведомого.
Функция createSlave() объекта hc05 позволяет создать ведомую роль Trema Bluetooth модулю HC-05 при подключении к любым Bluetooth модулям, но функции available() и read() объекта hc05 работают только при организации связи между двумя Trema Bluetooth модулями HC-05 использующими библиотеку iarduino_Bluetooth_HC05! Если данные принимаются от другого Bluetooth модуля, то их нужно читать посимвольно из UART, тогда код loop будет выглядеть так:
... // Если внешним Bluetooth устройством передающим данные является не Trema Bluetooth модуль, то ...
void loop(){ // Данные принимаются посимвольным чтением из UART ...
if(softSerial.available()){ // Если есть принятые данные, то ...
String str; // Создаём строку str
while(softSerial.available()){ // Выполняем цикл пока есть что читать ...
str1+=softSerial.read(); // Читаем очередной принятый символ из UART в строку str
delay(5); // Задержка на 5 мс на случай медленного приёма
} // Цикл завершён, значит читать больше нечего
Serial.println(str); // Выводим прочитанные данные одной строкой
} //
} //
Строки кода до функции loop остаются без изменений. Все данные отправленные внешним Bluetooth модулем принимаются как строки.
Trema Bluetooth модуль в роли ведущего (Master) передаёт данные:
Связь осуществляется между двумя Trema Bluetooth модулями HC-05 использующими библиотеку iarduino_Bluetooth_HC05. Скетч модуля исполняющего роль slave приведён в предыдущем примере.
#include <SoftwareSerial.h> // Подключаем библиотеку SoftwareSerial для общения с модулем по программной шине UART
#include <iarduino_Bluetooth_HC05.h> // Подключаем библиотеку iarduino_Bluetooth_HC05 для работы с модулем
SoftwareSerial softSerial(2,3); // Создаём объект softSerial указывая выводы RX, TX (можно указывать любые выводы Arduino UNO). Вывод 2 Arduino подключается к выводу TX модуля, вывод 3 Arduino подключается к выводу RX модуля
iarduino_Bluetooth_HC05 hc05(4); // Создаём объект hc05 указывая любой вывод Arduino, который подключается к выводу K модуля
int myArray[3] = {123,456,789}; // Определяем массив с данными которые будем передавать, можно создавать массивы или переменные любых типов, в т.ч. и char, но не более 54 байт
void setup(){ //
Serial.begin (9600); // Инициируем передачу данных по аппаратной шине UART для вывода результата в монитор последовательного порта
Serial.print ("begin: "); // Выводим текст "begin: " в монитор последовательного порта
if( hc05.begin(softSerial) ) {Serial.println("Ok");} // Инициируем работу с Trema модулем hc05, указывая объект softSerial через который осуществляется связь по шине UART
else {Serial.println("Error");} // Если работа с модулем не инициирована, то выводим сообщение об ошибке
Serial.print ("create master: "); // Выводим текст "create master: " в монитор последовательного порта
if( hc05.createMaster("MyName","4567") ){Serial.println("Ok");} // Создаем ведущую роль модулю, указывая имя и pin-код ведомого к которому требуется подключиться (в примере имя = "MyName", pin-код = "4567")
else {Serial.println("Error");} // Если роль не создалась или не удалось подключиться к ведомому - выводим сообщение об ошибке
} //
void loop (){ //
Serial.print ("send: "); // Выводим текст "send: " в монитор последовательного порта
if( hc05.send(myArray) ) {Serial.println("Ok");} // Передаём данные массива myArray через Trema-модуль bluetooth с проверкой доставки
else {Serial.println("Error");} // Если данные не приняты ведомым bluetooth устройством - выводим сообщение об ошибке
} // Функция send() предназначена для отправки данных только для Trema Bluetooth модулей использующих данную библиотеку!
Инициализация модуля hc05.begin(); и создание ведущей роли с подключением к ведомому hc05.createMaster(); может занять до минуты.
В этом примере модуль подключается через программный UART используя библиотеку SoftwareSerial, а при инициализации работы с модулем hc05.begin() указывается объект softSerial. Но модуль можно подключать и к аппаратному UART, тогда при инициализации работы с модулем hc05.begin() нужно указать Serial или Serial1, Serial2, Serial3, см. пример подключения к Arduino Mega.
Функция createMaster() объекта hc05 позволяет создать ведущую роль Trema Bluetooth модулю HC-05 при подключении к любым Bluetooth модулям, но функция send() объекта hc05 работает только при организации связи между двумя Trema Bluetooth модулями HC-05 использующими библиотеку iarduino_Bluetooth_HC05! Так как функция send() добавляет 4 служебных байта к передаваемым данным (2 в начале и 2 в конце), которые приёмник будет считать за полученные данные. Если требуется отправить данные на другие Bluetooth модули, это лучше сделать отправкой строки по шине UART, тогда код loop будет выглядеть так:
... // Если внешним Bluetooth устройством принимающим данные является не Trema Bluetooth модуль, то ...
void loop(){ // Данные передаются строкой или символами через UART ...
softSerial.println(myArray[0]); // Отправляем значение 0 элемента массива myArray, которое будет принято как строка
softSerial.println(myArray[1]); // Отправляем значение 1 элемента массива myArray, которое будет принято как строка
softSerial.println(myArray[2]); // Отправляем значение 2 элемента массива myArray, которое будет принято как строка
} //
Строки кода до функции loop остаются без изменений. Все данные передаются символами (байтами) или строками. По этому элементы массива отправляются по отдельности.
Скетч поиска любых Bluetooth устройств в радиусе действия:
#include <SoftwareSerial.h> // Подключаем библиотеку SoftwareSerial для общения с модулем по программной шине UART
#include <iarduino_Bluetooth_HC05.h> // Подключаем библиотеку iarduino_Bluetooth_HC05 для работы с модулем
SoftwareSerial softSerial(2,3); // Создаём объект softSerial указывая выводы RX, TX (можно указывать любые выводы Arduino UNO). Вывод 2 Arduino подключается к выводу TX модуля, вывод 3 Arduino подключается к выводу RX модуля
iarduino_Bluetooth_HC05 hc05(4); // Создаём объект hc05 указывая любой вывод Arduino, который подключается к выводу K модуля
int myArray[3] = {123,456,789}; // Определяем массив с данными которые будем передавать, можно создавать массивы или переменные любых типов, в т.ч. и char, но не более 54 байт
void setup(){ //
Serial.begin (9600); // Инициируем передачу данных по аппаратной шине UART для вывода результата в монитор последовательного порта
Serial.print ("begin: "); // Выводим текст "begin: " в монитор последовательного порта
if( hc05.begin(softSerial) ) {Serial.println("Ok");} // Инициируем работу с Trema модулем hc05, указывая объект softSerial через который осуществляется связь по шине UART
else {Serial.println("Error");} // Если работа с модулем не инициирована, то выводим сообщение об ошибке
} //
void loop (){ //
int i = hc05.find(10); // Выполняем поиск устройств, не дольше 10 секунд:
if(i){ Serial.print ("found ");
Serial.print (i);
Serial.println(" devices:");
for(int j=0; j<i; j++){ Serial.print ( "Name: "); Serial.print(hc05.findName[j]);
Serial.print (", Address: "); Serial.print(hc05.findAddr[j]);
Serial.println(";");
}
}else{ Serial.println("Device not found.");}
}
Инициализация модуля hc05.begin(); может занять несколько секунд.
В этом примере модуль подключается через программный UART используя библиотеку SoftwareSerial, а при инициализации работы с модулем hc05.begin() указывается объект softSerial. Но модуль можно подключать и к аппаратному UART, тогда при инициализации работы с модулем hc05.begin() нужно указать Serial или Serial1, Serial2, Serial3, см. пример подключения к Arduino Mega.
Скетч поиска любых Bluetooth устройств при подключении модуля к аппаратной шине UART1 платы Arduino Mega:
#include <iarduino_Bluetooth_HC05.h> // Подключаем библиотеку iarduino_Bluetooth_HC05 для работы с модулем
iarduino_Bluetooth_HC05 hc05(2); // Создаём объект hc05 указывая любой вывод Arduino, который подключается к выводу K модуля
int myArray[3] = {123,456,789}; // Определяем массив с данными которые будем передавать, можно создавать массивы или переменные любых типов, в т.ч. и char, но не более 54 байт
// Модуль подключается к аппаратной шине UART1. Вывод 19 Arduino (RX) подключается к выводу TX модуля, вывод 18 Arduino (TX) подключается к выводу RX модуля
void setup(){ //
Serial.begin(9600); // Инициируем передачу данных по аппаратной шине UART для вывода результата в монитор последовательного порта
Serial.print ("begin: "); // Выводим текст "begin: " в монитор последовательного порта
if( hc05.begin(Serial1) ) {Serial.println("Ok");} // Инициируем работу с Trema модулем hc05, указывая класс Serial1 через который осуществляется связь с модулем
else {Serial.println("Error");} // Если работа с модулем не инициирована, то выводим сообщение об ошибке
} //
void loop (){ //
int i = hc05.find(10); // Выполняем поиск устройств, не дольше 10 секунд:
if(i){ Serial.print("found ");
Serial.print(i);
Serial.println(" devices:");
for(int j=0; j<i; j++){ Serial.print( "Name: "); Serial.print(hc05.findName[j]);
Serial.print(", Address: "); Serial.print(hc05.findAddr[j]);
Serial.println(";");
}
}else{ Serial.println("Device not found.");}
delay(1000);
}
Инициализация модуля hc05.begin(); может занять несколько секунд.
В этом примере модуль подключается к Arduino MEGA через аппаратный UART1, а при инициализации работы с модулем hc05.begin() указывается объект Serial1. Подключение дополнительных библиотек и инициализация шины UART1 не нужна Serial1.begin(38400);. У платы Arduino MEGA имеется 4 аппаратных шины UART с которыми работают классы: Serial, Serial1, Serial2, Serial3, любой из них можно использовать при инициализации модуля для работы с ним.
Описание основных функций библиотеки:
Подключение библиотеки:
#include <iarduino_Bluetooth_HC05.h> // Подключаем библиотеку для работы с модулем iarduino_Bluetooth_HC05 hc05(4); // Создаём объект hc05 указывая любой вывод Arduino который подключается к выводу K модуля
Функция begin();
- Назначение: Инициализация работы с модулем по шине UART.
- Синтаксис: begin( ОБЪЕКТ_UART );
- Параметры:
- ОБЪЕКТ - класс или объект который используется для работы с шиной UART к которой подключён модуль.
- Возвращаемые значения: bool - результат инициализации (true или false).
- Примечание:
- Функция вызывается 1 раз в коде setup.
- Используемый ОБЪЕКТ_UART не нуждается в предварительной инициализации (
Serial.begin( СКОРОСТЬ );) - Можно указать объект программной шины UART или класс Serial, Serial1, Serial2, Serial3 и т.д. в зависимости от используемой платы Arduino. Если указать класс Serial, то при загрузке скетча потребуется отключать модуль от Arduino, а все выводы данных в монитор последовательного порта будут восприниматься модулем как команды.
- Пример:
hc05.begin(Serial1); // Инициируем работу модуля по аппаратной шине UART используя класс Serial1
- Пример:
#include <SoftwareSerial.h> // Подключаем библиотеку SoftwareSerial для работы с программной шиной UART SoftwareSerial softSerial(2,3); // Создаём объект softSerial назначая выводы RX, TX (можно указывать любые выводы Arduino UNO) ... hc05.begin(softSerial); // Инициируем работу модуля по программной шине UART используя объект softSerial
Функция createSlave();
- Назначение: Создание ведомого Bluetooth устройства (Slave) ожидающего подключение.
- Синтаксис: createSlave( ИМЯ , PIN-КОД );
- Параметры:
- ИМЯ - строка содержащая имя назначаемое данному Bluetooth модулю.
- PIN-КОД - строка содержащая код доступа к данному Bluetooth модулю.
- Возвращаемые значения: bool - результат создания ведомого устройства (true или false).
- Примечание:
- ИМЯ не должно превышать 32 символа.
- PIN-КОД не должен превышать 16 символов.
- Ранее установленные соединения (если они были) будут разорваны.
- Функция создаёт роль ведомого (Slave), но не ждёт соединение с ведущим.
- Если функция вернула true, то её дальнейший вызов не обязателен (даже после отключения питания).
Модуль будет соединяться с любыми ведущими (Master) Bluetooth устройствами, которые правильно введут Имя и PIN.
- Пример:
hc05.createSlave("MyName", "4567"); // Создание ведомого с именем "MyName" и PIN-кодом "4567"
Функция createMaster();
- Назначение: Создание ведущего Bluetooth устройства (Master) с подключением к ведомому устройству.
- Синтаксис: createMaster( ИМЯ , PIN-КОД );
- Параметры:
- ИМЯ - строка содержащая имя ведомого Bluetooth устройства к которому требуется подключиться.
- PIN-КОД - строка содержащая код доступа ведомого Bluetooth устройства к которому требуется подключиться.
- Возвращаемые значения: bool - результат создания ведущего устройства и подключения к ведомому (true или false).
- Примечание:
- ИМЯ не должно превышать 32 символа.
- PIN-КОД не должен превышать 16 символов.
- Ранее установленные соединения (если они были) будут разорваны.
- Функция создаёт роль ведущего (Master) и ждёт соединение с ведомым.
- Ведомое устройство (Slave) должно находиться в радиусе действия и ожидать подключения.
- Если функция вернула true, то её дальнейший вызов не обязателен (даже после отключения питания).
Модуль будет автоматически соединяться с указанным ведомым (Slave) Bluetooth устройством, пока не будет вызвана функция библиотеки разрывающая данное соединение, как на ведущем (Master), так и на ведомом (Slave) Bluetooth устройстве.
- Пример:
hc05.createMaster("MyName", "4567"); // Создание ведущего с подключением к ведомому устройству "MyName" по PIN-коду "4567"
Функция find();
- Назначение: Поиск любых устройств Bluetooth в радиусе действия.
- Синтаксис: find( ВРЕМЯ , [ ФЛАГ ] );
- Параметры:
- ВРЕМЯ - число от 1 до 48 определяющее максимальное время поиска Bluetooth устройств.
- ФЛАГ - значение (true или false) разрешающее поиск по уровню сигнала.
- Возвращаемые значения: uint8_t - количество найденных Bluetooth устройств.
- Примечание:
- Время поиска рассчитывается умножением числа ВРЕМЯ на 1,28 секунд.
- Необязательный параметр ФЛАГ по умолчанию сброшен (поиск ведётся в стандартном режиме).
- Функция прекращает поиск при обнаружении 5 устройств или по достижении указанного времени.
- Ранее установленные соединения (если они были) будут разорваны.
- Функция только находит Bluetooth устройства, но не сопрягает и не соединяет модуль с ними.
- Имена и адреса найденных устройств доступны в строковых массивах findName и findAddr.
- Пример:
i=hc05.find(10); // Ищем Bluetooth устройства, но не более чем 10*1,28 секунд
if(i){ // Если найдено хоть одно Bluetooth устройство, то ...
for(int j=0; j<i; j++){ // Проходим по всем найденным устройствам и выводим результат в монитор последовательного порта
Serial.print(") Name: "); Serial.print(hc05.findName[j]); Serial.print(", Address: "); Serial.println(hc05.findAddr[j]);
}
}
Функция end();
- Назначение: Разрыв подключения к внешнему Bluetooth устройству.
- Синтаксис: end();
- Параметры: Нет.
- Возвращаемые значения: Нет.
- Примечание:
- Функция работает вне зависимости от роли модуля и того было подключение или нет.
- После выполнения функции, роль модуля сохраняется.
- После выполнения функции, автоматическое переподключение к последнему Bluetooth устройству будет недоступно.
- Пример:
hc05.end(); // Разорвать соединение с внешним Bluetooth устройством
Функция checkConnect();
- Назначение: Проверка подключения к внешнему Bluetooth устройству.
- Синтаксис: checkConnect();
- Параметры: Нет.
- Возвращаемые значения: bool - наличие соединения (true или false).
- Примечание: Функция работает вне зависимости от роли модуля.
- Пример:
bool f=hc05.checkConnect(); // Получаем результат наличия соединения с внешним Bluetooth устройством в переменную-флаг f
Функция send();
- Назначение: Отправка данных внешнему Trema Bluetooth модулю, так же использующему эту библиотеку.
- Синтаксис: send( ДАННЫЕ );
- Параметры:
- ДАННЫЕ - строка, переменная или массив любого типа, которые требуется отправить.
- Возвращаемые значения: bool - подтверждение приёма данных внешним Bluetooth устройством (true или false).
- Примечание:
- Функция работает только при организации связи между двумя Trema Bluetooth модулями использующими эту библиотеку.
- Размер отправляемых данных не должен превышать 54 байта.
- До передачи данных необходимо установить соединение функциями createMaster() или createSlave().
- Отправлять данные модуль может вне зависимости от установленной роли (как Master, так и Slave).
- Функция вернёт true только если внешнее Trema Bluetooth устройство использует данную библиотеку и оно получило отправленные данные полностью, и без ошибок (библиотека проверяет ошибки сверяя CRC16 на принимающей стороне.
- Функция способна отправлять только те массивы, размер которых был явно указан при их объявлении.
- Если данной функцией отправить данные на Bluetooth устройство не использующее эту библиотеку, то оно получит данные в виде строки с двумя дополнительными символами в начале и конце строки.
- Пример:
int a = 1234; // Определяем переменную типа int (целочисленные значения)
long b[2] = {1234,5678}; // Определяем массив данных типа long (целочисленные длинные значения)
double c = 12.34; // Определяем переменную типа double (значения с плавающей точкой)
char d[12] = "iArduino.ru" // Определяем строку из 12 символов (11 значащих символов + символ конца строки)
...
hc05.send(a); // Отправляем переменную «a» (без проверки доставки)
if( hc05.send(a) ){ ... } // Отправляем переменную «a» (если данные доставлены, то выполнится код в теле оператора if)
if( hc05.send(b) ){ ... } // Отправляем переменную «b» (если данные доставлены, то выполнится код в теле оператора if)
if( hc05.send(c) ){ ... } // Отправляем переменную «c» (если данные доставлены, то выполнится код в теле оператора if)
if( hc05.send(d) ){ ... } // Отправляем переменную «d» (если данные доставлены, то выполнится код в теле оператора if)
hc05.send("Prosto stroka"); // Отправляем строку (без проверки доставки)
Функция available();
- Назначение: Проверка наличия принятых данных от внешнего Trema Bluetooth модуля, так же использующего эту библиотеку.
- Синтаксис: available( [ &ЭЛЕМЕНТЫ [ ,& БАЙТЫ ] );
- Параметры:
- ЭЛЕМЕНТЫ - необязательная ссылка на переменную в которую вернётся количество элементов в принятом массиве. Если принята переменная, а не массив, то вернётся 0.
- БАЙТЫ - необязательная ссылка на переменную в которую вернётся количество байт в принятом массиве или переменной.
- Возвращаемые значения: bool - наличие или отсутствие принятых данных доступных для чтения (true или false).
- Примечание:
- Функция работает только при организации связи между двумя Trema Bluetooth модулями использующими эту библиотеку.
- Если нет принятых данных, то функция вернёт false, а переменные на которые указывают ссылки останутся без изменений.
- Если есть принятые данные доступные для чтения, то функция вернет true, а сами данные можно прочитать функцией read().
- Если данные приняты с ошибкой (не совпал CRC16) то функция поведёт себя так, как будто нет принятых данных.
- Принимать данные модуль может вне зависимости от установленной роли (как Master, так и Slave).
- Функцию нельзя использовать для проверки получения данных от Bluetooth модулей не использующих эту библиотеку, так как в их данных не будет присутствовать CRC16.
- Пример:
int a; // Объявляем переменную в которой будет храниться количество элементов принятого массива
int b; // Объявляем переменную в которой будет храниться размер принятых данных в байтах
if( hc05.available() ){ ... } // Если есть принятые данные, то выполнится код в теле оператора if
if( hc05.available(&a) ){ ... } // Тоже самое, только в переменной «а» будет находиться число равное количеству элементов в принятом массиве
if( hc05.available(&a,&b) ){ ... } // Тоже самое, только в переменной «b» будет находиться число равное количеству байт в принятом массиве или переменной
Функция read();
- Назначение: Чтение данных пришедших от внешнего Trema Bluetooth модуля, так же использующего эту библиотеку.
- Синтаксис: read( ПЕРЕМЕННАЯ );
- Параметры:
- ПЕРЕМЕННАЯ - в которую будут записаны принятые данные (строки, числа, массивы).
- Возвращаемые значения: bool - подтверждение успешного чтения (true или false).
- Примечание:
- Функция работает только при организации связи между двумя Trema Bluetooth модулями использующими эту библиотеку.
- До приёма данных необходимо проверить их наличие функцией available().
- Тип переменной в которую читаются данные должен совпадать с типом передаваемых данных.
Чтение произойдёт даже если типы не совпадают, но принятые данные могут отличаться от переданных. - Принимать данные модуль может вне зависимости от установленной роли (как Master, так и Slave).
- Если после функции available() и до функции read() выполнить любые другие функции библиотеки, то принятые данные будут потеряны.
- Функцию нельзя использовать для получения данных от Bluetooth модулей не использующих эту библиотеку, так как перед данной функцией требуется обратиться к функции available().
- Пример:
int a; // Объявляем переменную типа int (целочисленные значения)
if( hc05.available() ){hc05.read(a);} // Если есть принятые данные, то читаем их в переменную «a»
- Пример:
long b[2]; // Объявляем массив данных типа long (целочисленные длинные значения)
if( hc05.available() ){hc05.read(b);} // Если есть принятые данные, то читаем их в массив «b»
Функция runAT();
- Назначение: Выполнение AT-команд и вывод результата.
- Синтаксис: runAT( КОМАНДА [ , ВРЕМЯ [ , ВЫХОД ]] );
- Параметры:
- КОМАНДА - строка содержащая AT-команду которую требуется выполнить.
- ВРЕМЯ - положительное целое число миллисекунд которое отводится на выполнение команды (по умолчанию 500 мс).
- ВЫХОД - флаг (true или false) разрешающий досрочный выход при успешном выполнении команды (по умолчанию true).
- Возвращаемые значения: char* - указатель на строку с ответом модуля.
- Примечание:
- Данная функция позволяет выполнять операции с модулем которые не вошли в функционал библиотеки.
- Результат выполнения AT-команды можно анализировать как по строке ответа модуля, так и по значению переменной flgResult.
- Пример:
Serial.println(hc05.runAT("AT\r\n")); // Выполняем AT-команду "AT" - тест, результат выводим в монитор последовательного порта
- Пример:
hc05.runAT("AT\r\n"); // Выполняем AT-команду "AT" - тест
if( hc05.flgResult < 0 ){ ... } // Если в ответе встретилась фраза "ERROR:(x)" - ошибка, где x это число
if( hc05.flgResult > 0 ){ ... } // Если в ответе встретилась фраза "OK\r\n" - успешное выполнение команды
if( hc05.flgResult ==0 ){ ... } // Если в ответе нет ни ошибки ни успеха - результат выполнения AT-команды не определён
Переменная flgResult:
Содержит результат выполнения последней AT-команды (тип int8_t), -1: Error(*), 0: Неизвестно, 1: OK.
Массив findName:
Содержит пять строк с именами (или адресами) найденных Bluetooth устройств (тип char*).
Массив findAddr:
Содержит пять строк с адресами найденных Bluetooth устройств (тип char*).
Библиотека работает только с Trema Bluetooth модулями HC-05.
Если требуется принять или передать данные Bluetooth устройству которое не является Trema-модулем, или не использует данную библиотеку, то соединение с этим устройством выполняется функциями createMaster() или createSlave(), а передача и приём данных осуществляется через стандартные функции объекта UART через который осуществляется связь с модулем, см. дополнение к первым двум примерам.
Применение:
- Создание связи между двумя Arduino.
- Создание связи между Arduino и другими ведущими Bluetooth устройствами: телефонами, планшетами, компьютерами и т.д.
- Создание связи между Arduino и другими ведомыми Bluetooth устройствами: гарнитурами, клавиатурами, мышками и т.д.
- Дистанционное управление роботами, устройствами, проектами и т.д.
- Дистанционное получение данных от датчиков, детекторов, сигнализаций и т.д.
- Создание Bluetooth ретрансляторов для увеличения дальности беспроводной связи.

Обсуждение