

")
 |
 |
Общие сведения:
Trema модуль - Расширитель выводов, I2C-flash - является устройством ввода/вывода с подключением по шине I2С. У модуля имеются 8 выводов, каждый из которых может работать в качестве: цифрового входа, цифрового выхода, или аналогового входа. Первые 4 вывода (с номерами 0 - 3) могут работать в качестве выходов с ШИМ, они же позволяют управлять сервоприводами.
Модуль относится к серии «Flash», а значит к одной шине I2C можно подключить более 100 модулей, так как их адрес на шине I2C (по умолчанию 0x09), хранящийся в энергонезависимой памяти, можно менять программно.
Модуль можно использовать в любых проектах где требуется большое число выводов, как цифровых, так и аналоговых.
Видео:
Спецификация:
- Напряжение питания: 3,3 или 5 В (постоянного тока)
- Потребляемый ток: до 6 мА.
- Напряжение логических уровней: 3,3 В (все выводы толерантны к 5 В).
- Напряжение аналоговых уровней: до 3,3 В (все выводы толерантны к 5 В).
- Разрешение АЦП: 12 бит (значение от 0 до 4095).
- Разрешение ШИМ: 12 бит (значение от 0 до 4095).
- Частота ШИМ: 1 - 12'000 Гц (по умолчанию 490 Гц).
- Количество цифровых выводов: 8 (работают как на вход, так и на выход).
- Количество аналоговых входов: 8 (АЦП).
- Количество выходов с поддержкой ШИМ: 4 (выводы № 0 - 3).
- Интерфейс: I2C.
- Скорость шины I2C: 100 кбит/с.
- Адрес на шине I2C: устанавливается программно (по умолчанию 0x09).
- Уровень логической 1 на линиях шины I2C: 3,3 В (толерантны к 5 В).
- Рабочая температура: от -40 до +65 °C.
- Габариты: 30 x 30 мм.
- Вес: 7 г.
Все модули линейки "Trema" выполнены в одном формате

Подключение:
Перед подключением модуля ознакомьтесь с разделом "Смена адреса модуля на шине I2C" в данной статье.
Модуль подключается по шине I2C, все выводы которой (GND, Vcc, SDA, SCL) размещены на одной колодке модуля.
- SCL - вход/выход линии тактирования шины I2C.
- SDA - вход/выход линии данных шины I2C.
- Vcc - вход питания 3,3 или 5 В.
- GND - общий вывод питания.
Trema модуль - Расширитель выводов, I2C-flash подключается к аппаратной или программной шине I2C Arduino.
В комплекте имеется кабель для быстрого и удобного подключения модуля к колодке I2C на Trema Shield. Если на шине I2C уже имеется другое устройство, то для подключения модуля, предлагаем воспользоваться I2C Hub.
Модуль удобно подключать 3 способами, в зависимости от ситуации:
Способ - 1: Используя проводной шлейф и Piranha UNO
Используя провода «Папа — Мама», подключаем напрямую к контроллеру Piranha UNO.

Способ - 2: Используя Trema Set Shield
Модуль можно подключить к любому из I2C входов Trema Set Shield.

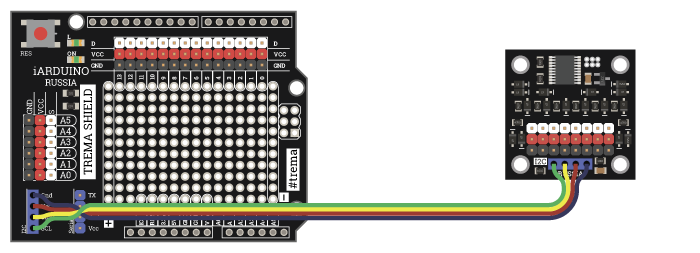
Способ - 3: Используя проводной шлейф и Shield
Используя 4-х проводной шлейф, к Trema Shield, Trema-Power Shield, Motor Shield, Trema Shield NANO и тд.
Способ - 4: Подключение к программной шине I2C
При использовании программной шины I2C, модуль можно подключить к любым выводам Arduino, но потребуется дополнительно установить библиотеку iarduino_I2C_Software.h, для создания программной шины I2C, указав номера выбранных вами выводов. О том как это сделать читайте ниже в разделе «Подключение библиотеки», а так же на странице Wiki - Расширенные возможности библиотек iarduino для шины I2C.
Питание:
Входное напряжение питания модуля 3,3В или 5В постоянного тока (поддерживаются оба напряжения питания), подаётся на выводы Vcc и GND.
Подробнее о модуле:
Модуль построен на базе микроконтроллера STM32F030F4 и снабжен собственным стабилизатором напряжения. У модуля имеются 8 выводов GPIO размещённых на белой колодке. Каждый вывод пронумерован с обеих сторон платы. Рядом с выводами GPIO есть два вывода питания (Vcc - красная колодка и GND - чёрная колодка). Все выводы GPIO могут работать как цифровые входы/выходы, так и в качестве аналоговых входов, а выводы 0-3 поддерживают вывод сигналов ШИМ на аппаратном уровне. На каждом выводе GPIO установлена схема защиты микроконтроллера от напряжений выше 3,3 В.
Модуль позволяет:
- Менять свой адрес на шине I2C.
- Считывать или задавать логические уровни на любом выводе GPIO.
- Считывать аналоговый уровень (12 бит АЦП) с любого вывода GPIO.
- Задавать сигнал ШИМ с указанным коэффициентом заполнения (12 бит) на первых 4 выводах.
- Задавать частоту ШИМ от 1 до 12'000 Гц (по умолчанию 490 Гц).
- Внутрисхемно подключать подтягивающие или прижимающие резисторы для каждого вывода.
- Выбирать внутреннюю схему работы выхода (двухтактная / с общим стоком).
- Управлять сервоприводами подключёнными к выводам GPIO 0 - 3.
Специально для работы с Trema модулем - Расширитель выводов, I2C-flash, нами разработана библиотека iarduino_I2C_Expander которая позволяет реализовать все функции модуля.
Подробнее про установку библиотеки читайте в нашей инструкции.
Смена адреса модуля на шине I2C:
По умолчанию все модули FLASH-I2C имеют установленный адрес 0х09.
Если вы планируете подключать более 1 модуля на шину I2C, необходимо изменить адреса модулей таким образом, чтобы каждый из них был уникальным.
Более подробно о том, как изменить адрес, а также о многом другом, что касается работы FLASH-I2C модулей, вы можете прочесть в этой статье.
В первой строке скетча необходимо записать в переменную newAddress адрес, который будет присвоен модулю. После этого подключите модуль к контроллеру и загрузите скетч. Адрес может быть от 0х07 до 0х7F.
uint8_t newAddress = 0x09; // Назначаемый модулю адрес (0x07 < адрес < 0x7F).
//
#include // Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_Expander.
#include // Подключаем библиотеку для работы с модулем
iarduino_I2C_Expander gpio; // Создаём объект gpio для работы с функциями и методами библиотеки iarduino_I2C_Expander.
// Если при объявлении объекта указать адрес, например, gpio(0xBB), то пример будет работать с тем модулем, адрес которого был указан.
void setup(){ //
Serial.begin(9600); //
if( gpio.begin(&Wire) ){ // Инициируем работу с расширителем выводов, указав ссылку на объект для работы с шиной I2C на которой находится расширитель (по умолчанию &Wire).
Serial.print("На шине I2C найден модуль с адресом 0x"); //
Serial.print( gpio.getAddress(), HEX ); // Выводим текущий адрес модуля.
Serial.print(" который является расширителем выводов\r\n"); //
if( gpio.changeAddress(newAddress) ){ // Меняем адрес модуля на newAddress.
Serial.print("Адрес модуля изменён на 0x"); //
Serial.println( gpio.getAddress(), HEX ); // Выводим текущий адрес модуля.
}else{ //
Serial.println("Адрес модуля изменить не удалось!"); //
} //
}else{ //
Serial.println("Расширитель выводов не найден!"); //
} //
} //
//
void loop(){} //
Данный пример использует библиотеку iarduino_I2C_Expander, которая работает только с модулями расширителей выводов, а значит позволяет менять только их адреса.
Смена и сортировка адресов на шине I2C:
Изменить адрес любого I2C модуля серии «Flash» можно аппаратно, используя установщик адресов FLASH-I2C. Это модуль подключаемый к шине I2C, на плате которого размещён дисплей и кнопки управления, при помощи которых можно узнать количество любых устройств на шине I2C, и менять адреса модулей Flash-I2C не отключая их от шины, что значительно сократит время сборки ваших проектов. Модуль оснащён разъемом USB через который можно запитать как сам модуль, так и шину I2C, или можно запитать шину I2C без использования разъема USB на плате модуля. Установщик адресов пригодиться в проектах с большим количеством модулей Flash-I2C.
Изменить адрес любого I2C модуля серии «Flash» можно программно, о том как это сделать рассказано в статье Wiki - Программная установка адресов модулей FLASH-I2C. В этой статье рассмотрены примеры с использованием библиотеки iarduino_I2C_Address, которая позволяет получать адреса любых устройств на шине I2C, менять адреса модулей Flash-I2C не отключая их от шины, получать название, номер модели, версию прошивки модулей Flash-I2C, а главное - автоматически сортировать адреса модулей Flash-I2C даже если на шине есть устройства с одинаковыми адресами.
Примеры:
В данном разделе раскрыты примеры работы модуля по шине I2C с использованием библиотеки iarduino_I2C_Expander. Сама библиотека содержит больше примеров, доступных из меню Arduino IDE: Файл / Примеры / iarduino_I2C_Expander.
Работа с логическими уровнями:
#include// Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_Expander. #include // Подключаем библиотеку для работы с расширителем выводов. iarduino_I2C_Expander gpio(0x09); // Создаём объект gpio для работы с функциями и методами библиотеки iarduino_I2C_Expander, указывая адрес модуля на шине I2C. // Если объявить объект без указания адреса (iarduino_I2C_Expander gpio;), то адрес будет найден автоматически. void setup(){ // gpio.begin(&Wire); // Инициируем работу с расширителем выводов, указав ссылку на объект для работы с шиной I2C на которой находится расширитель (по умолчанию &Wire). gpio.pinMode(0, INPUT, DIGITAL); // Конфигурируем вывод 0 на работу в качестве цифрового входа. // gpio.pinPull(0, PULL_UP); // Подтягиваем вход 0 до уровня VCC через внутренний резистор (для работы с кнопкой). // gpio.pinPull(0, PULL_DOWN); // Прижимаем вход 0 к уровню GND через внутренний резистор (для работы с кнопкой). gpio.pinMode(1, OUTPUT, DIGITAL); // Конфигурируем вывод 1 на работу в качестве цифрового выхода. } // // void loop(){ // bool level; // Объявляем переменную «level». level = gpio.digitalRead(0); // Читаем логический уровень с вывода №0 в переменную «level». gpio.digitalWrite(1, level); // Устанавливаем на выводе №1 уровень равный значению «level». } //
Данный пример устанавливает на 1 выводе логический уровень равный логическому уровню поступившему на вывод 0. Если логический уровень на выводе 0 создаётся кнопкой, то этот вывод можно подтянуть до уровня Vcc или прижать к уровню GND, в зависимости от схемы подключения кнопки.
Работа с аналоговыми уровнями:
#include// Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_Expander. #include // Подключаем библиотеку для работы с расширителем выводов. iarduino_I2C_Expander gpio(0x09); // Создаём объект gpio для работы с функциями и методами библиотеки iarduino_I2C_Expander, указывая адрес модуля на шине I2C. // Если объявить объект без указания адреса (iarduino_I2C_Expander gpio;), то адрес будет найден автоматически. void setup(){ // gpio.begin(&Wire); // Инициируем работу с расширителем выводов, указав ссылку на объект для работы с шиной I2C на которой находится расширитель (по умолчанию &Wire). gpio.pinMode(0, INPUT, ANALOG); // Конфигурируем вывод 0 на работу в качестве аналогового входа. gpio.pinMode(1, OUTPUT, ANALOG); // Конфигурируем вывод 1 на работу в качестве аналогового выхода. } // // void loop(){ // uint16_t level; // Объявляем переменную «level». level = gpio.analogRead(0); // Читаем аналоговый уровень с вывода №0 в переменную «level». gpio.analogWrite(1, level); // Устанавливаем на выводе №1 уровень равный значению «level». } //
Данный пример устанавливает на 1 выводе сигнал ШИМ, уровень которого прямо пропорционален напряжению подведённому к выводу 0. Удобство данного примера заключается в том, что диапазон считанных аналоговых уровней (0-4095) совпадает с диапазоном устанавливаемых значений ШИМ (0-4095).
Чтение логического уровня с аналогового входа:
#include// Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_Expander. #include // Подключаем библиотеку для работы с расширителем выводов. iarduino_I2C_Expander gpio(0x09); // Создаём объект gpio для работы с функциями и методами библиотеки iarduino_I2C_Expander, указывая адрес модуля на шине I2C. // Если объявить объект без указания адреса (iarduino_I2C_Expander gpio;), то адрес будет найден автоматически. void setup(){ // gpio.begin(&Wire); // Инициируем работу с расширителем выводов, указав ссылку на объект для работы с шиной I2C на которой находится расширитель (по умолчанию &Wire). gpio.pinMode(0, INPUT, ANALOG ); // Конфигурируем вывод 0 на работу в качестве аналогового входа. gpio.pinMode(1, OUTPUT, DIGITAL); // Конфигурируем вывод 1 на работу в качестве цифрового выхода. gpio.levelWrite(512); // Указываем аналоговый уровень разделяющий уровень логического 0 от 1. gpio.levelHyst (12); // Указываем гистерезис аналогового уровня в ±12. } // // void loop(){ // bool level; // Объявляем переменную «level». level = gpio.levelRead(0); // Читаем логический уровень с аналогового вывода №0 в переменную «level». gpio.digitalWrite(1, level); // Устанавливаем на выводе №1 уровень равный значению «level». } //
Данный пример преобразует аналоговый уровень со входа 0 в логический уровень на выходе 1. Главной особенностью данного примера является то, что в коде setup() задаётся граница по которой модуль определяет разницу между уровнями логической 1 и логического 0 на аналоговом входе (все аналоговые значения выше 512+12 будут расценены как логическая 1, все значения ниже 512-12 будут расценены как 0, а значения 512-12...512+12 вернут предыдущий логический уровень). Таким образом модуль способен считывать данные со схем, логические уровни которых ниже 3,3 В.
Управление сервоприводами:
#include// Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_Expander. #include // Подключаем библиотеку для работы с расширителем выводов. iarduino_I2C_Expander gpio(0x09); // Создаём объект gpio для работы с функциями и методами библиотеки iarduino_I2C_Expander, указывая адрес модуля на шине I2C. // Если объявить объект без указания адреса (iarduino_I2C_Expander gpio;), то адрес будет найден автоматически. void setup(){ // gpio.begin(&Wire); // Инициируем работу с расширителем выводов, указав ссылку на объект для работы с шиной I2C на которой находится расширитель (по умолчанию &Wire). gpio.pinMode(0, OUTPUT, SERVO); // Конфигурируем вывод 0 на работу в качестве выхода для сервопривода. gpio.pinMode(1, OUTPUT, SERVO); // Конфигурируем вывод 1 на работу в качестве выхода для сервопривода. // gpio.servoAttach(0, 500, 2500, 0, 180); // Определяем параметры сервопривода: вывод 0, длительность импульсов от 500 до 2500 мс, угол поворота от 0 до 180°. // gpio.servoAttach(1, 513, 2430, 0, 180); // Определяем параметры сервопривода: вывод 1, длительность импульсов от 513 до 2430 мс, угол поворота от 0 до 180°. } // // void loop(){ // gpio.servoWrite(0, 170); gpio.servoWrite(1, 100); delay(500); // Поворачиваем сервопривод подключённый к выводу 0 в угол 170°, а подключённый к выводу 1 в угол 100° и ждём пол секунды. gpio.servoWrite(0, 10); gpio.servoWrite(1, 10); delay(500); // Поворачиваем оба сервопривода (на выводах 0 и 1) в угол 10° и ждём пол секунды. } //
Данный пример поворачивает один сервопривод на угол 170°, а второй на угол 100°, ждёт пол секунды и возвращает оба сервопривода в угол 0°, через пол секунды всё повторяется. Если Ваш сервопривод имеет угол поворота не 180°, а 60°, 90°, 270°, 360° и т.д., или он не точно поворачивается, или Вы желаете ограничить угол его поворота, то Вы можете настроить его параметры, указав крайние углы поворота и длительность импульсов ШИМ для них при помощи функции servoAttach().
Описание функций библиотеки:
В данном разделе описаны функции библиотеки iarduino_I2C_Expander для работы с Trema модулем - Расширитель выводов, I2C-flash.
Библиотека iarduino_I2C_Expander может использовать как аппаратную, так и программную реализацию шины I2C. О том как выбрать тип шины I2C рассказано ниже в разделе «Подключение библиотеки», а так же на странице Wiki - расширенные возможности библиотек iarduino для шины I2C.
Подключение библиотеки:
- Если используется аппаратная шина I2C:
#include// Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_Expander.h #include // Подключаем библиотеку для работы с модулем. // iarduino_I2C_Expander gpio(0x09); // Создаём объект gpio для работы с функциями и методами библиотеки iarduino_I2C_Expander, указывая адрес модуля на шине I2C. // iarduino_I2C_Expander gpio; // Если адрес модуля не известен, то его можно не указывать, он будет найден автоматически. // Если адрес не указан, то на шине должен находиться только один модуль. void setup(){ // ... // gpio.begin(&Wire); // Инициируем работу с модулем, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire). ... // Доступны объекты: &Wire, &Wire1, &Wire2... } //
- Если используется программная шина I2C:
#include// Подключаем библиотеку для работы с программной шиной I2C, до подключения библиотеки iarduino_I2C_Expander.h SoftTwoWire sWire(3,4); // Создаём объект программной шины I2C указав выводы которым будет назначена роль линий: SDA, SCL. // #include // Подключаем библиотеку для работы с модулем. iarduino_I2C_Expander gpio(0x09); // Создаём объект gpio для работы с функциями и методами библиотеки iarduino_I2C_Expander, указывая адрес модуля на шине I2C. // iarduino_I2C_Expander gpio; // Если адрес модуля не известен, то его можно не указывать, он будет найден автоматически. // Если адрес не указан, то на шине должен находиться только один модуль. void setup(){ // ... // gpio.begin(&sWire); // Инициируем работу с модулем, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire). ... // } //
- В обоих примерах сначала подключается библиотека для работы с шиной I2C. Для аппаратной шины библиотека
Wire.h(предустановлена в Arduino IDE), а для программной шины библиотека iarduino_I2C_Software.h, с созданием объекта которому указываются выбранные вами выводы шины, в примере выводы(3-SDA, 4-SCL). - Далее подключается библиотека и создаётся объект для работы с модулем.
- В коде
Setup(), при инициализации работы с модулем указывается ссылка на объект работы с выбранной шиной I2Cbegin(&ШИНА). Остальные строки кода одинаковы для любой шины I2C.
Функция begin();
- Назначение: Инициализация работы с модулем.
- Синтаксис: begin();
- Параметры:
- &ШИНА - Ссылка на объект для работы с шиной I2C на которой находится модуль.
- Для аппаратной шины: &Wire, &Wire1, &Wire2..., если подключена библиотека Wire.h
- Для программной шины: ссылка на объект библиотеки iarduino_I2C_Software.h.
- Параметр является не обязательным, по умолчанию используется ссылка &Wire.
- Возвращаемое значение: bool - результат инициализации (true или false).
- Примечание: По результату инициализации можно определить наличие модуля на шине.
- Пример:
if( gpio.begin() ){ Serial.print( "Модуль найден и инициирован!" ); }
else { Serial.print( "Модуль не найден на шине I2C" ); }
Функция reset();
- Назначение: Перезагрузка модуля.
- Синтаксис: reset();
- Параметры: Нет.
- Возвращаемое значение: bool - результат перезагрузки (true или false).
- Пример:
if( gpio.reset() ){ Serial.print( "Модуль перезагружен" ); }
else { Serial.print( "Модуль не перезагружен" ); }
Функция changeAddress();
- Назначение: Смена адреса модуля на шине I2C.
- Синтаксис: changeAddress( АДРЕС );
- Параметры:
- uint8_t АДРЕС - новый адрес модуля на шине I2C (целое число от 0x08 до 0x7E)
- Возвращаемое значение: bool - результат смены адреса (true или false).
- Примечание: Текущий адрес модуля можно узнать функцией getAddress().
- Пример:
if( gpio.changeAddress(0x12) ){ Serial.print( "Адрес модуля изменён на 0x12" ); }
else { Serial.print( "Не удалось изменить адрес" ); }
Функция getAddress();
- Назначение: Запрос текущего адреса модуля на шине I2C.
- Синтаксис: getAddress();
- Параметры: Нет.
- Возвращаемое значение: uint8_t АДРЕС - текущий адрес модуля на шине I2C (от 0x08 до 0x7E)
- Примечание: Функция может понадобиться если адрес модуля не указан при создании объекта, а обнаружен библиотекой.
- Пример:
Serial.print( "Адрес модуля на шине I2C = 0x" ); Serial.println( gpio.getAddress(), HEX );
Функция getVersion();
- Назначение: Запрос версии прошивки модуля.
- Синтаксис: getVersion();
- Параметры: Нет
- Возвращаемое значение: uint8_t ВЕРСИЯ - номер версии прошивки от 0 до 255.
- Пример:
Serial.print( "Версия прошивки модуля " ); Serial.println( gpio.getVersion() );
Функция pinMode();
- Назначение: Конфигурирование вывода на требуемый режим работы.
- Синтаксис: pinMode( НОМЕР ВЫВОДА , НАПРАВЛЕНИЕ РАБОТЫ , ТИП СИГНАЛА );
- Параметры:
- uint8_t НОМЕР ВЫВОДА - целое число от 0 до 7, или значение ALL_PIN.
- uint8_t НАПРАВЛЕНИЕ РАБОТЫ - может принимать одно из двух значений:
- INPUT - вывод работает как вход (по умолчанию).
- OUTPUT - вывод работает как выход.
- uint8_t ТИП СИГНАЛА (не обязательный параметр):
- DIGITAL - вывод работает как цифровой вход или выход (по умолчанию).
- ANALOG - вывод работает как аналоговый вход, или выход с ШИМ.
- SERVO - вывод работает с сервоприводом.
- Если тип сигнала не указан, то он остаётся без изменений.
- Возвращаемое значение: Нет.
- Примечание:
- При конфигурировании хотя бы одного вывода на работу с сервоприводом, частота ШИМ на всех выводах поддерживающих ШИМ упадёт до 50 Гц.
- Функция pinMode() является обязательной только для работы с сервоприводами. В остальных случаях, при попытке чтения с выхода или записи на вход, вывод будет автоматически переконфигурирован (но на это уйдёт время необходимое для отправки одного дополнительного пакета по шине I2C).
- Пример:
gpio.pinMode( ALL_PIN, INPUT, ANALOG ); // Конфигурируем все выводы на работу в качестве аналоговых входов. gpio.pinMode( 2, OUTPUT ); // Переконфигурируем вывод № 2 на работу в качестве выхода, так как тип сигнала не указан, значит он останется аналоговым.
Функция pinPull();
- Назначение: Внутрисхемное подключение резистора к выводу.
- Синтаксис: pinPull( НОМЕР ВЫВОДА , РЕЗИСТОР );
- Параметры:
- uint8_t НОМЕР ВЫВОДА - целое число от 0 до 7, или значение ALL_PIN.
- uint8_t РЕЗИСТОР - может принимать одно из двух значений:
- PULL_UP - подключить резистор подтягивающий вывод до уровня логической 1.
- PULL_DOWN - подключить резистор прижимающий вывод к уровню логического 0.
- Возвращаемое значение: Нет.
- Примечание:
- Подключать внутрисхемные резисторы можно к любому выводу, в т.ч. и сконфигурированному в качестве выхода, например, по схеме с открытым стоком.
- Пример:
gpio.pinPull( 5, PULL_UP ); // Подтянуть вывод № 5 до уровня Vcc.
Функция pinOutScheme();
- Назначение: Выбор внутренней схемы включения выхода.
- Синтаксис: pinOutScheme( НОМЕР ВЫВОДА , СХЕМА );
- Параметры:
- uint8_t НОМЕР ВЫВОДА - целое число от 0 до 7, или значение ALL_PIN.
- uint8_t СХЕМА - может принимать одно из двух значений:
- OUT_PUSH_PULL - двухтактная схема (по умолчанию).
- OUT_OPEN_DRAIN - схема с открытым стоком.
- Возвращаемое значение: Нет.
- Примечание:
- Схему можно указать как до, так и после конфигурирования вывода на работу в качестве выхода.
- При двухтактной схеме работы, что на выход записывается, то на нём и появляется.
- При использовании схемы с открытым стоком, выход работает по иному. Если записать 0 то и на выходе появится 0, а если запись 1, то выход перейдёт в состояние высокого импеданса. В таких схемах часто подтягивают выход до уровня логической 1, это можно сделать функцией pinPull().
- Пример:
gpio.pinOutScheme( 0, OUT_OPEN_DRAIN ); // Если вывод № 0 сконфигурирован как выход, то он является выходом с открытым стоком.
Функция digitalRead();
- Назначение: Чтение логического уровня с вывода.
- Синтаксис: digitalRead( НОМЕР ВЫВОДА);
- Параметр: uint8_t НОМЕР ВЫВОДА - целое число от 0 до 7, или значение ALL_PIN.
- Возвращаемое значение: uint8_t ЛОГИЧЕСКИЙ УРОВЕНЬ - значение HIGH (1), или LOW (0).
- Примечание:
- Если вывод был сконфигурирован как выход, то он будет автоматически переконфигурирован на работу в качестве входа.
- Если вывод был сконфигурирован как аналоговый, то он будет автоматически переконфигурирован как цифровой.
- Если в качестве параметра указать не номер вывода, а значение ALL_PIN, то функция вернёт не логический уровень, а число, каждый бит которого соответствует логическому уровню считанному с вывода номер которого совпадает с номером бита.
- Пример:
bool i = gpio.digitalRead( 0 ); // Считать логический уровень с вывода № 0. bool j = gpio.digitalRead( ALL_PIN ) & bit(0); // Узнать логический уровень на выводе № 0.
Функция digitalWrite();
- Назначение: Установка логического уровня на выводе.
- Синтаксис: digitalWrite( НОМЕР ВЫВОДА , ЛОГИЧЕСКИЙ УРОВЕНЬ );
- Параметры:
- uint8_t НОМЕР ВЫВОДА - целое число от 0 до 7, или значение ALL_PIN.
- uint8_t ЛОГИЧЕСКИЙ УРОВЕНЬ - значение HIGH (1), или LOW (0).
- Возвращаемое значение: Нет.
- Примечание:
- Если вывод был сконфигурирован как вход, то он будет автоматически переконфигурирован на работу в качестве выхода.
- Если вывод был сконфигурирован как аналоговый, то он будет автоматически переконфигурирован как цифровой.
- Пример:
gpio.digitalWrite( 7, LOW ); // Установить низкий логический уровень на выводе № 7.
Функция analogRead();
- Назначение: Чтение аналогового (АЦП) уровня с вывода.
- Синтаксис: analogRead( НОМЕР ВЫВОДА );
- Параметр: uint8_t НОМЕР ВЫВОДА - целое число от 0 до 7.
- Возвращаемое значение: uint16_t УРОВЕНЬ - целое число от 0 до 4095.
- Примечание:
- Если вывод был сконфигурирован как выход, то он будет автоматически переконфигурирован на работу в качестве входа.
- Если вывод был сконфигурирован как цифровой, то он будет автоматически переконфигурирован как аналоговый.
- Пример:
uint16_t i = gpio.analogRead( 7 ); // Считать аналоговый уровень с вывода № 7.
Функция analogWrite();
- Назначение: Установка аналогового (ШИМ) уровня на выводе.
- Синтаксис: analogWrite( НОМЕР ВЫВОДА , УРОВЕНЬ );
- Параметры:
- uint8_t НОМЕР ВЫВОДА - целое число от 0 до 7, или значение ALL_PIN.
- uint16_t УРОВЕНЬ - целое число от 0 до 4095.
- Возвращаемое значение: Нет.
- Примечание:
- Если вывод был сконфигурирован как вход, то он будет автоматически переконфигурирован на работу в качестве выхода.
- Если вывод был сконфигурирован как цифровой, то он будет автоматически переконфигурирован как аналоговый.
- Сигналы ШИМ поддерживают только выводы 0 - 3, попытка записи аналогового (ШИМ) уровня на выводы 4 - 7 приведёт к установке на них логических уровней:
- Значения от 0 до 2047 приведут к установке уровня логического 0.
- Значения от 2048 до 4095 приведут к установке уровня логической 1.
- Пример:
gpio.analogWrite( 1, 1023 ); // Установить аналоговый (ШИМ) сигнал с 25% заполнением.
Функция analogAveraging();
- Назначение: Установка коэффициента усреднения показаний АЦП.
- Синтаксис: analogAveraging( УСРЕДНЕНИЕ );
- Параметр: uint8_t УСРЕДНЕНИЕ - значение от 0 (не усреднять) до 255 (макс. усреднение).
- Возвращаемое значение: Нет.
- Примечание:
- Чем выше значение усреднения, тем плавнее будет меняться аналоговый уровень считываемый функцией analogRead(). Слишком высокое усреднение приведёт к большой инерционности показаний, а слишком маленькое усреднение приведёт к «скачкам» показаний. Значение по умолчанию 127 (50% от максимального значения).
- Усреднение применяется ко всем выводам модуля.
- Пример:
gpio.analogAveraging( 10 ); // Установить небольшое усреднение показаний АЦП.
Функция levelRead();
- Назначение: Чтение логического уровня с аналогового входа.
- Синтаксис: levelRead( НОМЕР ВЫВОДА );
- Параметр: uint8_t НОМЕР ВЫВОДА - целое число от 0 до 7, или значение ALL_PIN.
- Возвращаемое значение: uint8_t ЛОГИЧЕСКИЙ УРОВЕНЬ - значение HIGH (1), или LOW (0).
- Примечание:
- Если вывод был сконфигурирован как выход, то он будет автоматически переконфигурирован на работу в качестве входа.
- Если вывод был сконфигурирован как цифровой, то он будет автоматически переконфигурирован как аналоговый.
- Если в качестве параметра указать не номер вывода, а значение ALL_PIN, то функция вернёт не логический уровень, а число, каждый бит которого соответствует логическому уровню считанному с вывода номер которого совпадает с номером бита.
- Данная функция представляет интерес тем, что граница между логическим 0 и логической 1 может быть установлена функцией levelWrite(), что позволяет считывать данные со схем, логические уровни которых ниже 3,3 В.
- Пример: Указан ниже, сразу для трёх функций: levelRead(), levelWrite() и levelHyst().
Функция levelWrite();
- Назначение: Указание аналогового уровня являющегося границей между логическим 0 и 1.
- Синтаксис: levelWrite( ГРАНИЦА );
- Параметр: uint16_t ГРАНИЦА - целое число от 0 до 4095 (по умолчанию 2047).
- Возвращаемое значение: Нет.
- Примечание:
- Данная функция указывает границу по которой функция levelRead() преобразует считанное с вывода аналоговое значение в логические уровни. Если аналоговое значение ниже границы и гистерезиса - это 0, а если выше границы и гистерезиса - это 1.
- Гистерезис это значение указываемое функцией levelHyst(), оно расширяет границу.
- Пример: Указан ниже, сразу для трёх функций: levelRead(), levelWrite() и levelHyst().
Функция levelHyst();
- Назначение: Указание гистерезиса для границы АЦП между логическими 0 и 1.
- Синтаксис: levelHyst( ГИСТЕРЕЗИС );
- Параметр: uint16_t ГИСТЕРЕЗИС - целое число от 0 до 4095 (по умолчанию 205).
- Возвращаемое значение: Нет.
- Примечание:
- Данная функция указывает гистерезис который функция levelRead() добавляет к границе для определения логической 1 и вычитает из границы для определения логического 0.
- Пример:
gpio.levelWrite(3000); // Указываем границу равную 3000, для определения 0 и 1. gpio.levelHyst (100); // Указываем гистерезис границы равный ±100. bool i = gpio.levelRead(2); // Читаем логический уровень с аналогового вывода № 2 в переменную «i». /* * Если значение АЦП на выводе №2 меньше 3000 - 100 то функция levelRead() вернёт 0. * Если значение АЦП на выводе №2 больше 3000 + 100 то функция levelRead() вернёт 1. * Если значение АЦП на выводе №2 в пределах от 3000-100 до 3000+100 то * функция levelRead() вернёт значение которое она возвращала ранее для того же вывода. */
Функция freqPWM();
- Назначение: Установка частоты ШИМ.
- Синтаксис: freqPWM( ЧАСТОТА );
- Параметр: uint16_t ЧАСТОТА - значение от 1 до 12'000 Гц.
- Возвращаемое значение: Нет.
- Примечание:
- Частота устанавливается для всех выводов поддерживающих ШИМ.
- Частота ШИМ не влияет на коэффициент заполнения ШИМ каждого вывода.
- Частоту можно менять как до установки ШИМ на выводе (выводах), так и после.
- Пример:
gpio.freqPWM( 1000 ); // Установить частоту ШИМ в 1 кГц.
Функция servoAttach();
- Назначение: Указание настроек для сервопривода на выводе.
- Синтаксис: servoAttach( ВЫВОД , ШИРИНА_MIN , ШИРИНА_MAX [, УГОЛ_MIN , УГОЛ_MAX ] );
- Параметры:
- uint8_t ВЫВОД - целое число от 0 до 3 определяющее № вывода, или значение ALL_PIN.
- uint16_t ШИРИНА_MIN - целое число от 0 до 20'000 определяющее минимальную длительность импульса ШИМ в микросекундах для управления сервоприводом (значение по умолчанию 500).
- uint16_t ШИРИНА_MAX - целое число от 0 до 20'000 определяющее максимальную длительность импульса ШИМ в микросекундах для управления сервоприводом (значение по умолчанию 2'500).
- int16_t УГОЛ_MIN - целое число от -32'768 до +32'767 определяющее минимальный угол поворота сервопривода в градусах (значение по умолчанию 0°).
- int16_t УГОЛ_MAX - целое число от -32'768 до +32'767 определяющее максимальный угол поворота сервопривода в градусах (значение по умолчанию 180°).
- Возвращаемое значение: Нет.
- Примечание:
- Данная функция является необязательной, так как значения по умолчанию подходят для большинства сервоприводов.
- Функция настроек сервоприводов может быть полезна, если сервопривод имеет угол поворота отличный от 180°, или он не точно поворачивается (не доворачивается или перекручивается на несколько градусов), или Вы желаете ограничить угол поворота сервопривода.
- Настройки являются индивидуальными для каждого вывода.
- Пример:
gpio.pinMode ( 3, OUTPUT, SERVO ); // Конфигурируем вывод № 3 на работу с сервоприводом. gpio.servoAttach( 3 , 500 , 2500 , -90 , 90 ); // Настраиваем сервопривод подключённый к выводу № 3. gpio.servoWrite ( 3 , -90 ); delay( 500 ); // Поворачиваем сервопривод в угол -90° и ждём пол секунды. gpio.servoWrite ( 3 , 90 ); delay( 500 ); // Поворачиваем сервопривод в угол 90° и ждём пол секунды.
Функция servoWrite();
- Назначение: Поворот ротора сервопривода в указанный угол.
- Синтаксис: servoWrite( НОМЕР ВЫВОДА , УГОЛ ПОВОРОТА );
- Параметры:
- uint8_t НОМЕР ВЫВОДА - целое число от 0 до 3, или значение ALL_PIN.
- int16_t УГОЛ ПОВОРОТА - целое число от -32768 до +32767°.
- Возвращаемое значение: Нет.
- Примечание:
- Перед использованием функции servoWrite() необходимо сконфигурировать вывод модуля на работу с сервоприводом функцией pinMode().
- Угол поворота сервопривода не должен выходить за пределы указанные функцией servoAttach(), по умолчанию от 0 до 180°.
- Пример:
gpio.pinMode ( 1, OUTPUT, SERVO ); // Конфигурируем вывод № 1 на работу с сервоприводом. gpio.servoWrite ( 1 , 0 ); delay( 1000 ); // Поворачиваем сервопривода в угол 0° и ждём секунду. gpio.servoWrite ( 1 , 180 ); delay( 1000 ); // Поворачиваем сервопривода в угол 180° и ждём секунду.
Функция servoWriteMicroseconds();
- Назначение: Поворот ротора сервопривода указанием ширины импульсов ШИМ.
- Синтаксис: servoWriteMicroseconds( НОМЕР ВЫВОДА , ШИРИНА ИМПУЛЬСОВ );
- Параметры:
- uint8_t НОМЕР ВЫВОДА - целое число от 0 до 3, или значение ALL_PIN.
- uint16_t ШИРИНА ИМПУЛЬСОВ - целое число от 0 до 20'000 микросекунд.
- Возвращаемое значение: Нет.
- Примечание:
- Сервопривод управляется сигналом ШИМ с частотой 50 Гц. Функция servoWrite(), используя настройки указанные servoAttach(), преобразует полученный угол в ширину импульсов ШИМ и устанавливает этот сигнал на указанном выводе. Это удобно, но минимальный угол поворота сервопривода становится равным 1 градусу. Функция servoWriteMicroseconds() позволяет более точно управлять сервоприводом, но Вам самим прийдётся преобразовывать угол поворота в ширину импульсов.
- Перед использованием функции servoWrite() необходимо сконфигурировать вывод модуля на работу с сервоприводом функцией pinMode().
- Ширина импульсов не может быть выше 20'000 микросекунд, так как на частоте 50 Гц это время является (периодом) максимальным коэффициентом заполнения ШИМ.
T = 1/f = 1/50 = 0,02 сек = 20 мс = 20'000 мкс.
- Пример:
gpio.pinMode( 1, OUTPUT, SERVO ); // Конфигурируем вывод № 1 на работу с сервоприводом. gpio.servoWriteMicroseconds( 1 , 500 ); delay( 1000 ); // Поворачиваем сервопривода в угол 0° и ждём секунду. gpio.servoWriteMicroseconds( 1 , 2500 ); delay( 1000 ); // Поворачиваем сервопривода в угол 180° и ждём секунду.
Ссылки:
- Trema модуль - Расширитель выводов, I2C-flash.
- Wiki - Расширитель выводов, I2C (Metro-модуль) - Datasheet (аналог модуля).
- Библиотека iarduino_I2C_Expander.
- Библиотека iarduino_I2C_Software.
- Wiki - Расширенные возможности библиотек iarduino для шины I2C.
- Wiki - Установка библиотек в Arduino IDE.
- Wiki - Программная установка адресов модулей FLASH-I2C.

Обсуждение