


Общие сведения:
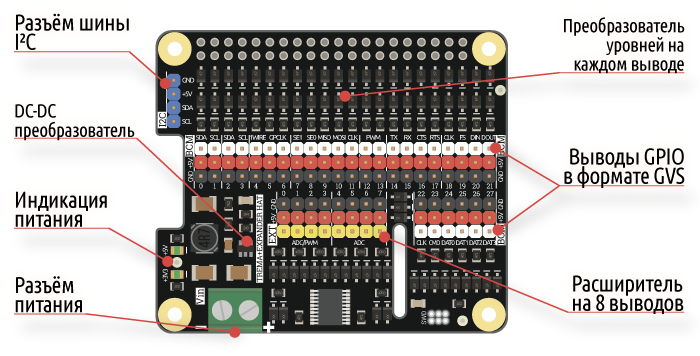
Trema+Expander Hat - это плата упрощающая процесс подключения устройств к Raspberry Pi, имеющая на борту цепь питания, все выводы GPIO Raspberry и добавляющая выводы с АЦП и аппаратной ШИМ. Все выводы выполнены в формате колодки GVS с питанием 5 вольт, добавлена совместимость с 5-ти вольтовой логикой, что упрощает процесс подключения устройств, таких как датчики, сервоприводы, потенциометры и т. д. Плата может питаться как от колодки GPIO Raspberry, так и от внешнего источника питания, при этом в последнем случае она сама будет питать Raspberry Pi и устройства, подключённые к колодкам.
Видео:
Спецификация:
- Диапазон напряжений на разъёме Vin: 6 ... 12 В
- Выходное напряжение: 5 В
- Выходной ток: до 2,5 А при Vin 9 В
- Интерфейс: I2C
- Колодки: BCM, EXT, I2C
- 8 выводов расширения c АЦП через I2C (4 поддерживают ШИМ, колодка EXT)
- Диапазон аналоговых уровней входов: 0 ... 4 В;
- Адрес на шине I2C: изменяемый (по умолчанию 0x08)
- Габариты: Hat
Подключение:
Для работы с модулем необходимо включить шину I2C.
Trema+Expander Hat разработан специально для одноплатных компьютеров семейства Raspberry Pi
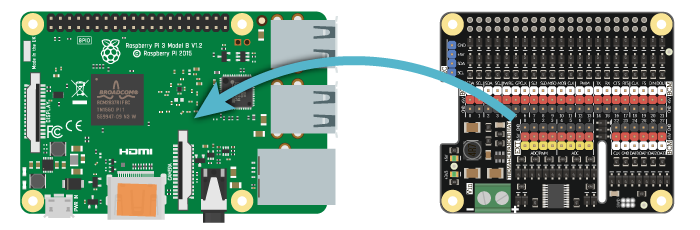
Trema+Expander Hat устанавливается на Raspberry Pi, а модули подключаются проводами к колодкам Trema+Expander Hat.
Питание:
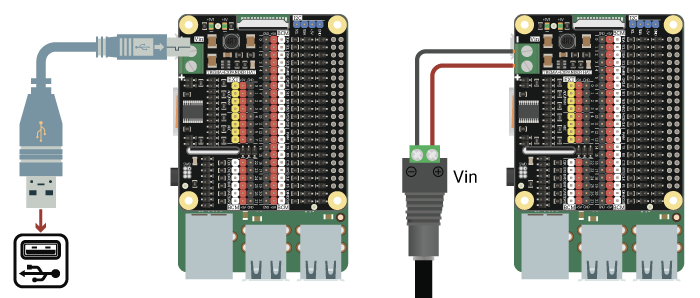
Плата может питаться как от Raspberry Pi, так и питать Raspberry Pi от внешнего источника. Для этого на плате имеется DC-DC преобразователь, работающий в диапазоне напряжений от 5,5 до 12 вольт, при этом напряжение питания на колодках всегда будет 5 вольт. Так же это даёт возможность подключения большего количества модулей.
Подробнее о Trema+Expander Hat:
- На плате Trema+Expander Hat имеются:
- Колодка BCM из 28 цифровых выводов GPIO с выводами шины питания (VCC и GND), для подключения цифровых модулей
- Колодка EXT из 8 выводов расширения:
- Все 8 можно использовать их как аналоговые входы, что позволит подключить аналоговые датчики
- Все 8 можно использовать как цифровые входы/выходы
- Первые 4 можно использовать как выходы с широтно-импульсной модуляцией (ШИМ)
- Колодка I2C аппаратной шины I2C из 4 выводов (SDA, SCL, GND, Vcc) для подключения I2C модулей
- Два светодиода, 3V3 и 5V - информирует о наличии питания
- Преобразователи напряжений на каждом выводе GPIO, что делает возможным использовать модули, работающие от 5 вольт с Raspberry.
- Цепь питания 5 вольт для Raspberry и устройств, подключаемых к колодкам.
На плате Trema+Expander Hat возле каждого информационного вывода находятся два вывода питания (VCC и GND) значит количество подключённых модулей, без пайки и «скрутки» проводов, может совпадать с количеством GPIO выводов Raspberry.
Помимо обычных выводов, на плате Trema+Expander Hat имеется колодка аппаратной шины I2C для подключения I2C модулей. Если Вам нужно подключить несколько модулей к шине I2C можно воспользоваться Trema I2C Hub.
Колодка BCM:
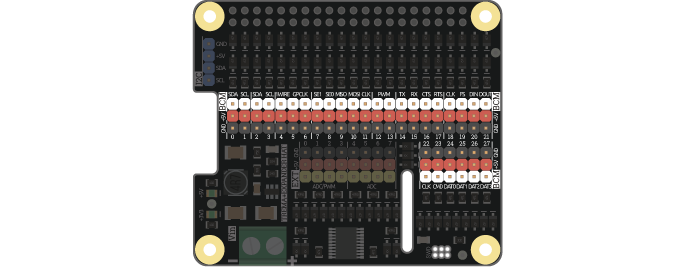
Все 28 выводов GPIO Raspberry Pi выведены на удобную колодку в формате GVS. Каждый вывод согласован с 5-ти вольтовой логикой, поэтому к выводам можно подключать модули как с 3-х, так и с 5-ти вольтовой логикой. Напряжение питания колодки 5 В.
Колодка EXT:
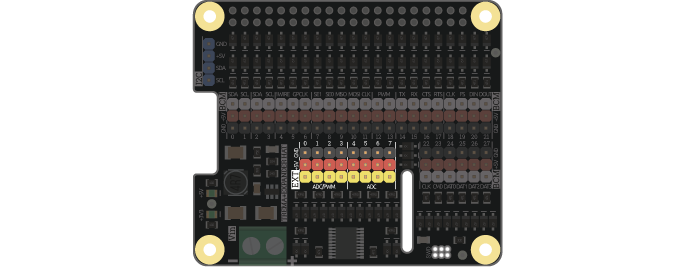
Главной отличительной особенностью Trema+Expander Hat является наличие восьми выводов расширения, четыре из которых поддерживают ШИМ и все восемь могут быть дополнительными цифровыми входами/выходами или аналоговыми входами. Каждый вывод согласован с 5-ти вольтовой логикой, поэтому к выводам можно подключать модули как с 3-х, так и с 5-ти вольтовой логикой. Напряжение питания колодки 5 В.
Для использования выводов расширения Trema+Expander Hat необходимо установить модуль для Python под названием pyiArdiunoI2Cexpander. Сделать это можно в редакторе Thonny Python IDE в меню Tools -> Manage Packages... или в эмуляторе терминала издав команду sudo pip3 install pyiArduinoI2Cexpander для установки для всех пользователей или pip3 install pyiArduinoI2Cexpander для установки для текущего пользователя или в виртуальную среду.
Подробнее про установку модулей Python
Аналоговый сигнал
Аналоговые входы, пригодятся для подключения аналоговых датчиков, такие как Датчик Холла, Потенциометр, Датчик освещённости, Аналоговый термометр и т.д. Так же выводы 0, 1, 2, 3 поддерживают 12-ти битную ШИМ и сервоприводы
Как и выводы колодки BCM, выводы колодки EXT согласованы с пятивольтовыми уровнями. Диапазон напряжений аналоговых входов при котором значения АЦП имеют линейную зависимость — от 0 до 3 В. Если аналоговый датчик использует полный диапазон значений до 5 вольт, то верхняя часть от 3 до 4 вольт будет иметь логарифмическую зависимость, а после 4 вольт воспринята АЦП как максимальное значение.
Цифровой сигнал
Цифровые входы/выходы так же могут быть использованы для подключения различных устройств, таких как Кнопка, Зуммер , Датчик наклона и т.д.
Колодка I2C:

Пример подключения внешних устройств:

Колода I2C подойдет для подключения внешних устройств, например очень удобно с помощью 4-проводного шлейфа «мама-мама» подключить модуль реле, и т.д. Напряжение питания колодки 5 В.
Примеры использования выводов расширения Trema+Expander Hat:
Для использования выводов расширения установите модуль Python pyiArduinoI2Cexpander.
Ссылка на подробную статью об установке модулей Python
Пример установки нового адреса:
from pyiArduinoI2Cexpander import * # Подключаем модуль для работы с расширителем выводов.
import sys # Импортируем модуль системных команд
from time import sleep # Импортируем функцию ожидания из модуля времени
ext = pyiArduinoI2Cexpander() # Создаём объект ext для работы с функциями модуля pyiArduinoI2Cexpander, указывая адрес модуля на шине I2C.
#
if len(sys.argv) < 2: # Если скрипту не были переданы аргументы
#
print("Недостаточно аргументов." # Выводим текст в stdout
"Для работы с программой" #
" введите: python3 " #
+ sys.argv[0] #
+ " <новый_адрес_модуля>") #
#
elif ext.begin(): # Иначе,
# Проверяем наличие расширителя на шине I2C
try: # Входим в try блок
#
newAddress = int(sys.argv[1]) # Преобразуем значение введённого
# аргумента в целое число
except ValueError: # Если преобразование не удалось
#
print("адрес должен быть " # информируем пользователя.
"целым числом " #
"в десятичной системе") #
else: #
print("На шине I2C найден " # Иначе
"модуль с адресом " #
"%#.2x который является" # форматируем строку,
" расширителем выводов" #
% ext.getAddress()) # выводим текущий адрес модуля.
#
if ext.changeAddress( # Если удалось изменить
newAddress): # адрес устройства на newAddress,
#
print("Адрес модуля" # информируем пользователя,
" изменён на " #
"%#.2x" # форматируем строку,
% ext.getAddress()) # выводим текущий адрес модуля.
#
else: #
#
print("Адрес модуля " #
"изменить не удалось!") #
#
else: #
#
print("Расширитель " #
"выводов не найден!") #
Данный скрипт меняет адрес расширителя выводов Trema+Expander Hat на шине I2C на указанный в стоке при запуске скрипта. Например, python3 NewAddress.py 10
Пример считывания аналогового значения:
# $ Строки со знаком $ являются необязательными.
#
from pyiArduinoI2Cexpander import * # Подключаем библиотеку для работы с расширителем выводов.
from time import sleep # Подключаем функцию sleep из модуля time
ext = pyiArduinoI2Cexpander(0x08) # Объявляем объект ext для работы с функциями и
# методами модуля pyiArduinoI2Cexpander.
sleep(.5) #
ext.pinMode(4, INPUT, ANALOG) # $ Конфигурируем вывод 4 на работу в качестве аналогового входа.
#
while True: #
pin4 = ext.analogRead(4); # Читаем аналоговый уровень с вывода №4 в переменную «pin4».
print("Pin_4="+str(pin4) #
+".\tДля выхода " #
"нажмите ctrl+c") # Выводим значение в stdout
sleep(.1) # $ Ждём десятую долю секунды, чтоб не захламлять stdout.
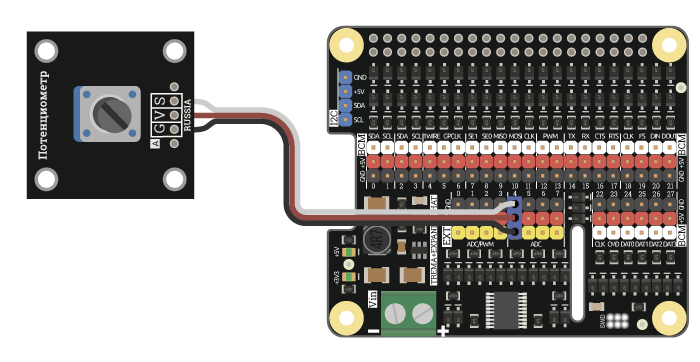
Для проверки работы скрипта, подключите потенциометр к 4 выводу. Аналоговый уровень считывается из АЦП модуля и может принимать значение от 0 (0В) до 4095 (3,3В). По умолчанию, значения АЦП усредняются, это подавляет скачки показаний, но увеличивает их инерционность, для отключения или изменения усреднения обратитесь к функции analogAveraging()
Пример усреднения АЦП:
# $ Строки со знаком $ являются необязательными.
from pyiArduinoI2Cexpander import * # Подключаем библиотеку для работы с расширителем выводов.
from time import sleep
gpio = pyiArduinoI2Cexpander(0x08) # Объявляем объект gpio для работы с функциями модуля pyiArduinoI2Cexpander, указывая адрес модуля на шине I2C.
# Если объявить объект без указания адреса (pyiArduinoI2Cexpander()), то адрес будет найден автоматически.
gpio.analogAveraging(255) # Указываем максимальный коэффициент усреднения показаний АЦП.
gpio.pinMode(4, INPUT, ANALOG) # $ Конфигурируем вывод 4 на работу в качестве аналогового входа.
#
while True: #
pin4 = gpio.analogRead(4) # Читаем аналоговый уровень с вывода №4 в переменную «pin4».
print("Pin_4="+str(pin4) #
+ ".\t Для выхода" #
" нажмите ctrl+c") #
sleep(.1) # $ Ждём десятую долю секунды, чтоб не захламлять stdout.
#
Для проверки работы скрипта подключите потенциометр к 4 выводу. Коэффициент усреднения АЦП задаётся функцией analogAveraging() которая в качестве аргумента принимает значение от 0 до 255. По умолчанию 127. Усреднение применяется для всех выводов. Чем выше коэффициент усреднения, тем плавнее будут меняться показания считанных аналоговых уровней. Для отключения усреднения укажите значение 0 или 1.
Пример чтения логического уровня:
# $ Строки со знаком $ являются необязательными.
from pyiArduinoI2Cexpander import * # Подключаем модуль для работы с расширителем выводов.
from time import sleep # Импортируем функцию ожидания из модуля времени
ext = pyiArduinoI2Cexpander(0x08) # Объявляем объект ext для работы с функциями модуля pyiArduinoI2Cexpander, указывая адрес модуля на шине I2C.
# Если объявить объект без указания адреса (pyiArduinoI2Cexpander()), то адрес будет найден автоматически.
ext.pinMode(4, INPUT, DIGITAL) # $ Конфигурируем вывод 4 на работу в качестве цифрового входа.
ext.pinPull(4, PULL_DOWN) # $ Прижимаем вывод 4 к уровню GND через внутренний резистор.
while True: #
pin4 = ext.digitalRead(4) # Читаем логический уровень с вывода №4 в переменную «pin4».
print("Pin_4=" + str(pin4) #
+ "\t\tНажмите ctrl+c" #
" для выхода") #
sleep(.1) # $ Ждём десятую долю секунды, чтоб не захламлять stdout.
#
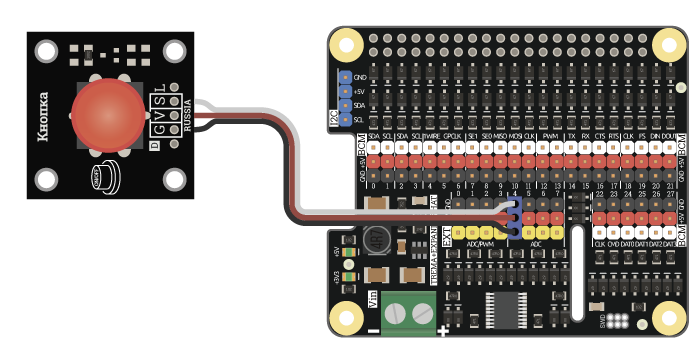
Для проверки работы скрипта подключите кнопку к 4 выводу и Vcc. Если Вы желаете подключить кнопку не к Vcc, а к GND, то уровень 4 вывода нужно не прижать к GND, а подтянуть до уровня Vcc. Для этого укажите функции pinPull() не PULL_DOWN, а PULL_UP.
Пример изменения логического уровня на выводе модуля:
# $ Строки со знаком $ являются необязательными.
from pyiArduinoI2Cexpander import * # Подключаем библиотеку для работы с расширителем выводов.
from time import sleep #
ext = pyiArduinoI2Cexpander(0x08) # Объявляем объект ext для работы с функциями модуля pyiArduinoI2Cexpander, указывая адрес модуля на шине I2C.
# Если объявить объект без указания адреса (pyiArduinoI2Cexpander()), то адрес будет найден автоматически.
ext.pinMode(4, OUTPUT, DIGITAL) # $ Конфигурируем вывод 7 на работу в качестве цифрового выхода.
print("Моргаем светодиодом." #
" Нажмите ctrl+c для выхода") #
while True: #
ext.digitalWrite(4, HIGH) # Устанавливаем высокий логический уровень на выводе 7.
sleep(.5) # Ждём пол секунды.
ext.digitalWrite(4, LOW) # Устанавливаем низкий логический уровень на выводе 7.
sleep(.5) # Ждём полсекунды.
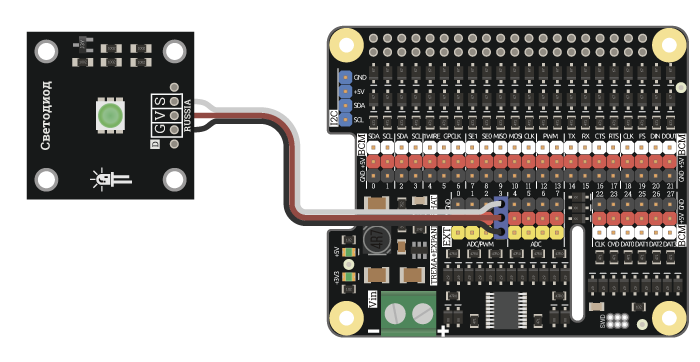
Для проверки работы скрипта подключите светодиод к 4 выводу.
Пример установки ШИМ на выводе модуля:
# $ Строки со знаком $ являются необязательными.
from pyiArduinoI2Cexpander import * # Подключаем библиотеку для работы с расширителем выводов.
from time import sleep # Импортируем функцию ожидания из модуля времени
ext = pyiArduinoI2Cexpander(0x08) # Объявляем объект ext для работы с функциями модуля pyiArduinoI2Cexpander, указывая адрес модуля на шине I2C.
# Если объявить объект без указания адреса (pyiArduinoI2Cexpander()), то адрес будет найден автоматически.
val = 2 # Определяем начальное аналоговое значение.
flg = 1 # Определяем флаг приращения аналогового значения (0-убывает, 1-растёт).
#
ext.pinMode(3, OUTPUT, ANALOG) # $ Конфигурируем вывод 3 на работу в качестве аналогового выхода.
print("Меняем аналоговое значение." #
" Нажмите ctrl+c для выхода") #
while True: # Входим в бесконечный цикл
sleep(.01) # Чем выше задержка, тем плавнее меняется аналоговый уровень.
if val <= 2 or flag: # Меняем спад аналогового уровня на рост.
val *= 1.05 # Увеличиваем аналоговое значение
flag = True # Устанавливаем флаг
if val >= 4095 or not flag: # Меняем рост аналогового уровня на спад.
val /= 1.05 # Уменьшаем аналоговое значение
flag = False # Сбрасываем флаг
#
ext.analogWrite(3, val); # Устанавливаем на 3 выводе уровень равный значению «val».
Для проверки работы скетча подключите светодиод к 3 выводу. Расширитель выводов имитирует аналоговый сигнал используя ШИМ. Сигнал ШИМ поддерживают только выводы 0,1,2,3. Для выводов 4,5,6,7, установка уровня от 0 до 2047 приведёт к появлению логического 0, а установка уровня от 2048 до 4095 к появлению логической 1.
Пример управления сервоприводом:
# $ Строки со знаком $ являются необязательными.
from pyiArduinoI2Cexpander import * # Подключаем библиотеку для работы с расширителем выводов.
from time import sleep #
ext = pyiArduinoI2Cexpander(0x08) # Объявляем объект ext для работы с функциями модуля pyiArduinoI2Cexpander, указывая адрес модуля на шине I2C.
#
ext.pinMode(3, OUTPUT, SERVO) # $ Конфигурируем вывод 3 на работу в качестве выхода для сервопривода.
print("Управляем сервоприводом. " #
"Нажмите ctrl+c для выхода.") #
while True: #
ext.servoWrite(3, 0) # Поворачиваем сервопривод в угол 0°.
sleep(.5) # Ждём полсекунды.
ext.servoWrite(3, 90) # Поворачиваем сервопривод в угол 90°.
sleep(.5) # Ждём полсекунды.
ext.servoWrite(3, 180) # Поворачиваем сервопривод в угол 180°.
sleep(.5) # Ждём полсекунды.
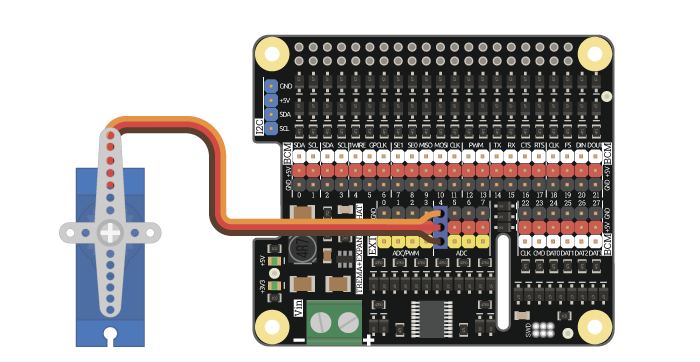
Для проверки работы скрипта подключите сервопривод к 3 выводу. По умолчанию модуль работает с сервоприводами у которых угол поворота равен 180°. Для работы с другими сервоприводами задайте их параметры используя функцию servoAttach(). Управление сервоприводами осуществляется с помощью сигнала ШИМ. Обращение к функции servoWrite() приводит к смене частоты ШИМ в значение 50 Гц на всех выводах поддерживающих ШИМ: 0,1,2,3. Значит если сконфигурировать любой другой вывод, поддерживающий ШИМ, на работу в качестве аналогового выхода, его сигнал так же снизится до 50 Гц.
Пример установки параметров сервопривода:
# $ Строки со знаком $ являются необязательными.
from pyiArduinoI2Cexpander import * # Подключаем библиотеку для работы с расширителем выводов.
from time import sleep # Импортируем функцию ожидания из модуля времени
ext = pyiArduinoI2Cexpander(0x08) # Объявляем объект ext для работы с функциями модуля pyiArduinoI2Cexpander, указывая адрес модуля на шине I2C.
#
ext.pinMode(0, OUTPUT, SERVO) # $ Конфигурируем вывод 0 на работу в качестве выхода для сервопривода.
ext.pinMode(1, OUTPUT, SERVO) # $ Конфигурируем вывод 1 на работу в качестве выхода для сервопривода.
ext.pinMode(2, OUTPUT, SERVO) # $ Конфигурируем вывод 2 на работу в качестве выхода для сервопривода.
ext.pinMode(3, OUTPUT, SERVO) # $ Конфигурируем вывод 3 на работу в качестве выхода для сервопривода.
ext.servoAttach(0, 500, 2500, # Определяем параметры сервопривода,
0, 180) # с углом поворота 180°, подключённого к выводу 0.
ext.servoAttach(1, 900, 2100, # Определяем параметры сервопривода,
0, 90) # с углом поворота 90°, подключённого к выводу 1.
ext.servoAttach(2, 1320, 1600, # Определяем параметры сервопривода,
-100, +100) # постоянного вращения, подключённого к выводу 2.
ext.servoAttach(3, 1100, 1700, # Определяем параметры сервопривода,
-100, +100) # постоянного вращения, подключённого к выводу 3.
print("Управляем сервоприводами. " #
"Нажмите ctrl+c для выхода.") # Назначение аргументов функции servoAttach() см. внизу скетча.
#
while True: #
ext.servoWrite(0, 0) # Поворачиваем сервопривод в минимальный угол.
ext.servoWrite(1, 0) # Поворачиваем сервопривод в минимальный угол.
ext.servoWrite(2, -60) # Заставляем медленно вращаться сервопривод против часовой стрелки.
ext.servoWrite(3, -60) # Заставляем медленно вращаться сервопривод против часовой стрелки.
sleep(.5) # Ждём пол секунды.
ext.servoWrite(0, 90) # Поворачиваем сервопривод в среднее положение.
ext.servoWrite(1, 45) # Поворачиваем сервопривод в среднее положение.
ext.servoWrite(2, 0) # Останавливаем сервопривод постоянного вращения.
ext.servoWrite(3, 0) # Останавливаем сервопривод постоянного вращения.
sleep(.5) # Ждём пол секунды.
ext.servoWrite(0, 180) # Поворачиваем сервопривод в максимальный угол.
ext.servoWrite(1, 90) # Поворачиваем сервопривод в максимальный угол.
ext.servoWrite(2, +60) # Заставляем медленно вращаться сервопривод по часовой стрелке.
ext.servoWrite(3, +60) # Заставляем медленно вращаться сервопривод по часовой стрелке.
sleep(.5) # Ждём пол секунды.
Для проверки работы скетча подключите сервоприводы к выводам. Параметры сервоприводов задаются из их datasheet. Функция servoAttach() принимает до 5 аргументов:
1 - номер вывода к которому подключён сервопривод.
2 - минимальная ширина импульсов ШИМ в микросекундах.
3 - максимальная ширина импульсов ШИМ в микросекундах.
4 - угол или значение соответствующее минимальной ширине импульса.
5 - угол или значение соответствующее максимальной ширине импульса.
ПРИМЕР:
Сервопривод с углом поворота в 45° подключён к 3 выводу модуля. При 0° ширина ШИМ = 600мкс, при 45° ширина ШИМ = 2300мкс.
ext.servoAttach(3, 600, 2300, 0, 45)
ext.servoWrite(3, угол от 0 до 45° )
Описание функций модуля pyiArduinoI2Cexpander:
Подключение модуля:
from pyiArduinoI2Cexpander import *
Создание объекта:
ext = pyiArduinoI2Cexpander(АДРЕС)
Функция begin()
- Назначение: инициализация расширителя выводов
- Синтаксис:
ext.begin() - Параметры: нет
- Возвращаемые значения: флаг инициализации
- Примечание: функция не обязательная, выполняется автоматически при создании объекта. Можно использовать для проверки наличия устройства на шине.
- Пример:
if ext.begin():
print("устройство найдено и инициализировано")
else:
print("устройство не найдено, проверьте включена ли шина I2C")
Функция changeAddress()
- Назначение: смена адреса устройства
- Синтаксис:
ext.changeAddress(newAddr) - Параметры: newAddr - новый адрес для устройства
- Возвращаемые значения: флаг выполнения. 1 - успешно, 0 - неуспешно.
- Примечание: нет
- Пример:
ext.changeAddress(0x0A)
Функция reset()
- Назначение: перезагрузка устройства
- Синтаксис:
ext.reset() - Параметры: нет
- Возвращаемые значения: флаг выполнения
- Примечание: нет
- Пример:
ext.reset()
Функция getAddress()
- Назначение: узнать текущий адрес устройства на шине I2C
- Синтаксис:
ext.getAddress() - Параметры: нет
- Возвращаемые значения: текущий адрес модуля на шине I2C
- Примечание: нет
- Пример:
addr = ext.getAddress()
Функция getVersion()
- Назначение: узнать текущую версию прошивки модуля
- Синтаксис:
ext.getVersion() - Параметры: нет
- Возвращаемые значения: текущая версия прошивки модуля
- Примечание: нет
- Пример:
ver = ext.getVersion()
Функция pinMode()
- Назначение: конфигурирование выводов
- Синтаксис:
ext.pinMode(pin, dir, type) - Параметры:
- pin - номер вывода (0-7)
- dir - направление работы вывода (INPUT, OUTPUT)
- type - тип сигнала (ANALOG, DIGITAL, SERVO)
- Возвращаемые значения:нет
- Примечание: функция не обязательная, выполняется автоматически при вызове функций, связанных с чтением или установкой уровней на выводах. Можно использовать, если необходимо чтоб вышеупомянутые функции выполнялись быстрее в первый раз в коде.
- Пример:
pot = 0 led = 1 servo = 3 ext.pinMode(pot, INPUT, ANALOG) ext.pinMode(led, OUTPUT, DIGITAL) ext.pinMode(servo, OUTPUT, SERVO)
Функция pinPull()
- Назначение: подключение к выводу прижимающего или подтягивающего резистора
- Синтаксис:
ext.pinMode(pin, pull) - Параметры:
- pin - номер вывода (0-7)
- pull - резистор (PULL_UP, PULL_DOWN, PULL_NO)
- Возвращаемые значения:нет
- Примечание: нет
- Пример:
button_pin = 0 ext.pinPull(button_pin, PULL_UP)
Функция pinOutScheme()
- Назначение: выбор схемы выхода
- Синтаксис:
ext.pinOutScheme(pin, mode) - Параметры:
- pin - номер вывода (0-7)
- mode - схема (OUT_PUSH_PULL, OUT_OPEN_DRAIN)
- Возвращаемые значения:нет
- Примечание: нет
- Пример:
ext.pinOutScheme(0, OUT_PUSH_PULL) ext.pinOutScheme(1, OUT_OPEN_DRAIN)
Функция digitalWrite()
- Назначение: установка логического уровня
- Синтаксис:
ext.digtalWrite(pin, level) - Параметры:
- pin - номер вывода (0-7)
- level - логический уровень (0, 1)
- Возвращаемые значения:нет
- Примечание: нет
- Пример:
led_pin = 1 ext.digitalWrite(led_pin, HIGH)
Функция digitalRead()
- Назначение: чтение логического уровня
- Синтаксис:
ext.digitalRead(pin) - Параметры: pin - номер вывода (0-7)
- Возвращаемые значения: логический уровень вывода
- Примечание: нет
- Пример:
button_pin = 0 ext.digitalRead(button_pin)
Функция analogWrite()
- Назначение: установка аналогового уровня
- Синтаксис:
ext.analogWrite(pin, level) - Параметры:
- pin - номер вывода (0-7)
- level - аналоговый уровень (0-4095)
- pin - номер вывода (0-7)
- Возвращаемые значения:нет
- Примечание: нет
- Пример:
led_pin = 1 ext.analogWrita(led_pin, 2048)
Функция analogRead()
- Назначение: чтение аналогового уровня
- Синтаксис:
ext.analogRead(pin) - Параметры: pin - номер вывода (0-7)
- Возвращаемые значения: аналоговый уровень (0-4095)
- Примечание: нет
- Пример:
pot_pin = 3 val = ext.analogRead(pot_pin)
Функция analogAveraging()
- Назначение: установка коэффициента усреднения показаний АЦП
- Синтаксис:
ext.analogAveraging(coef) - Параметры: coef - коэффициент усреднения (0-255)
- Возвращаемые значения: нет
- Примечание: нет
- Пример:
ext.analogAveraging(255)
Функция levelWrite()
- Назначение: установка аналогового уровня для функции levelRead()
- Синтаксис:
ext.levelWrite(level) - Параметры: level - аналоговый уровень, разделяющий логический 0 и 1 (0-4095)
- Возвращаемые значения:нет
- Примечание: нет
- Пример:
ext.levelWrite(512)
Функция levelRead()
- Назначение: чтение логического уровня с аналогового вывода
- Синтаксис:
ext.levelRead() - Параметры: pin - номер вывода (0-7)
- Возвращаемые значения: логический уровень (0, 1)
- Примечание: нет
- Пример:
pot_pin = 3 ext.levelWrite(512) val = ext.levelRead(pot_pin)
Функция levelHyst()
- Назначение: установка гистерезиса для функции levelRead()
- Синтаксис:
ext.levelHyst(hyst) - Параметры: hyst - гистерезис (0-4094)
- Возвращаемые значения: нет
- Примечание: нет
- Пример:
ext.levelHyst(12)
Функция freqPWM()
- Назначение: установка частоты ШИМ
- Синтаксис:
ext.freqPWM(freq) - Параметры: freq - частота ШИМ в кГц (0-12000)
- Возвращаемые значения:нет
- Примечание: нет
- Пример:
ext.freqPWM(440)
Функция servoAttach()
- Назначение: конфигурирование вывода для сервопривода
- Синтаксис:
ext.servoAttach(pin, width_min, width_max, angle_min, angle_max) - Параметры:
- pin - номер вывода (0-7)
- width_min - минимальная ширина импульса, мкс (0-20000)
- width_max - максимальная ширина импульса, мкс (0-20000)
- angle_min - угол при минимальной ширине, градусы (0-360°)
- angle_max - угол при максимальной ширине, градусы (0-360°)
- Возвращаемые значения:нет
- Примечание: нет
- Пример:
servo_pin = 0 ext.pinMode(servo_pin, OUTPUT, SERVO) ext.servoAttach(servo_pin, 500, 2500, 0, 180)
Функция servoWrite()
- Назначение: установка угла поворота сервопривода
- Синтаксис:
ext.servoWrite(pin, angle) - Параметры:
- pin - номер вывода (0-3)
- angle - угол поворота, градусы(0-360°)
- Возвращаемые значения: нет
- Примечание: нет
- Пример:
servo_pin = 0 ext.servoWrite(servo_pin, 90)
Функция servoWriteMicroseconds()
- Назначение: установка ширины импульсов для сервопривода
- Синтаксис:
ext.servoWriteMicroseconds(pin, width) - Параметры:
- pin - номер вывода (0-3)
- width - ширина импульсов, мкс (0-20000)
- Возвращаемые значения: нет
- Примечание: нет
- Пример:
servo_pin = 0 ext.servoWriteMicroseconds(servo_pin, 1500)
Применение:
- Подключение большого количества модулей к Raspberry Pi

Обсуждение