UART - Универсальный Асинхронный Приёмопередатчик
Общие сведения:
Универсальный асинхронный приёмопередатчик (Univsersal Asynchronos Reciever-Transmitter) - это физическое устройство приёма и передачи данных по двум проводам. Оно позволяет двум устройствам обмениваться данными на различных скоростях. В спецификацию UART не входят аналоговые уровни на которых ведётся общение между устройствами, UART это протокол передачи единиц и нулей, электрическую спецификацию на себя берут другие стандарты, такие как TTL (transistor-transistor logic — транзисторно-транзисторная логика), RS-232, RS-422, RS-485 и другие (RS [англ.recommended standard] — рекомендованный стандарт). На данный момент в микроконтроллерах используется в основном TTL (или точнее CMOS) UART для соединения не более двух устройств. В наших примерах мы часто называем его последовательным портом.
Подключение:
У каждого устройства, поддерживающего UART обычно обозначены два вывода: RX и TX. TX — означает transmit (передаю), RX — receive (принимаю). Отсюда становится понятно что RX одного устройства нужно подключать к TX другого. Если Вы подключите RX одного устройства к RX другого, то оба устройства будут слушать друг друга, вы соединили их входы. Если соединить TX и TX - это уже более опасно, это выходы низкого сопротивления устройств и если на одном будет логическая единица, а на втором ноль — по проводу пойдёт ток короткого замыкания (это зависит от конкретной программной или аппаратной реализации). Хотя в современных чипах от этого есть защита, на всякий случай, не стоит на неё ориентироваться. Так же необходимо объединить референсные уровни двух устройств (GND-GND), если не подразумевается гальваническая развязка.

Пример соединения двух UNO:
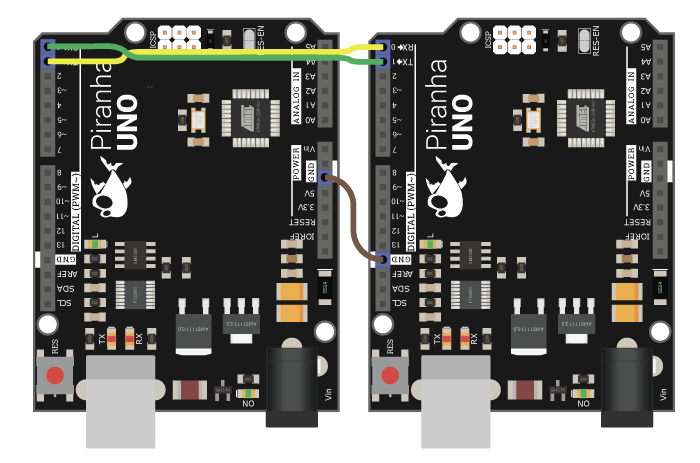
UART на Arduino:
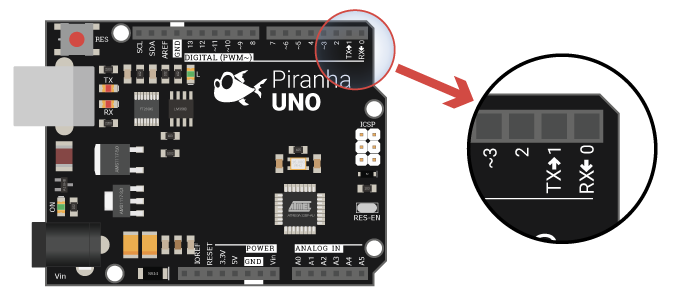
На Arduino и Arduino-совместимых платах аппаратный UART обозначается символами RX и TX рядом с соответствующими выводами. На Arduino UNO/Piranha UNO это 0 и 1 цифровые выводы:
Arduino UNO/Piranha UNO
В скетче инициализируется функцией begin() в коде функции setup():
Serial.begin( СКОРОСТЬ );или
Serial.begin( СКОРОСТЬ, ПАРАМЕТРЫ );Пример:
void setup()
{
Serial.begin(9600);
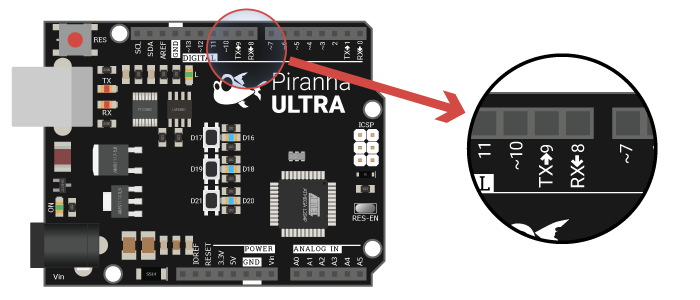
}Piranha ULTRA
На Piranha ULTRA присутствуют два аппаратных UART. Один на тех же выводах, что и UNO, второй на 8 (RX) и 9 (TX) выводах:
В Arduino IDE второй аппаратный UART называется Serial1 (Сериал один), и инициализируется так же как и первый:
Serial1.begin(9600);
Простой пример для копирования буфера первого UART'а во второй и наоборот:
void setup()
{
// Инициируем UART
Serial.begin(9600);
Serial1.begin(9600);
}
void loop()
{
// Пока буфер первого UART не пуст
while(Serial.available()) {
// Выводим следующий байт FIFO в буфер второго
Serial1.write(Serial.read);
}
// Пока буфер второго UART не пуст
while(Serial1.available()) {
// Выводим следующий байт FIFO в буфер первого
Serial.write(Serial1.read);
}
}
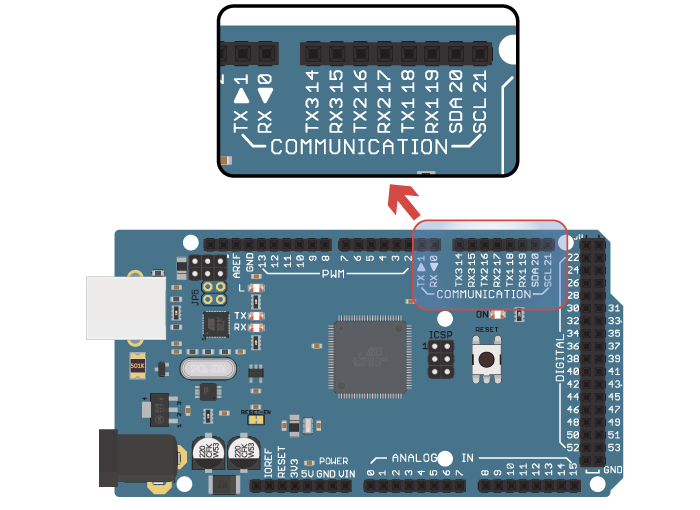
Arduino MEGA
У Arduino MEGA, помимо UART'a на цифровых выводах 0 и 1 как и у UNO, присутствуют ещё три аппаратных UART. На плате это выводы 19 (RX1), 18 (TX1), 17 (RX2), 16 (TX2) и 15 (RX3), 14 (TX3) соответственно. UART совместимый по расположению с UNO обозначен RX0, TX0:
На заметку: На многих Arduino и Arduino-совместимых платах UART0 используется для загрузки скетчей, так что если Ваш скетч не загружается, проверьте эти выводы. Во время загрузки скетча к ним ничего не должно быть подключено.
Отладка проектов при помощи UART
В совокупности с монитором последовательного порта UART может быть очень полезен для отладки кода. Например, если не понятно доходит ли Ваш код до определённого места или какие значения принимает переменная, можно вызвать функцию println() и вывести значение переменной или какое-нибудь сообщение в монитор порта. В Arduino IDE монитор порта находится в меню Инструменты -> Монитор порта, так же его можно вызвать нажав пиктограмму лупы в правом верхнем углу главного окна Arduino IDE или вызвать с клавиатуры комбинацией клавиш Ctrl+Shift+M. Перед вызовом монитора порта необходимо выбрать порт с которым Вы хотите работать. Сделать это можно в меню Инструменты -> Порт.
Для удобства отладки можно указать директивы препроцессора языка Си #define, #ifdef, #ifndef
Пример:
/*
* Определяем DEBUG.
* Если эту строку удалить
* или закомментировать
* код от #ifdef DEBUG до
* #endif не будет скомпилирован
* и в монитор порта (в данном примере)
* ничего не будет выведено.
*/
#define DEBUG
void setup()
{
// Инициируем последовательный порт
Serial.begin(9600);
/*
* Ждём старта последовательного порта
* (необходимо для чипов со встроенным
* USB-UART преобразователем).
*/
while(!Serial);
}
void loop()
{
// Создаём флаг составного числа.
bool not_prime = false;
for (int n = 2; n < 100; n++) {
for (int i = 2; i < n / 2; i++) {
// Проверяем факторы (делители) числа.
if (n % i == 0) {
/*
* Если есть факторы
* устанавливаем флаг,
* выходим из цикла проверки.
*/
not_prime = true;
break;
}
}
/*
* Если определён DEBUG
* выводим простые числа
* в монитор порта.
*/
#ifdef DEBUG
if (not_prime == false) {
Serial.println(n);
}
#endif
not_prime = false;
}
// Останавливаем выполнение скетча.
while(true);
}Программный UART на Arduino
Помимо аппаратного UART в Arduino можно использовать программный. Программный порт хорошо подходит для простых проектов, не критичных к времени работы кода или для отладки проектов, позволяя не отключать модули использующие UART во время загрузки сетчей. При его использовании нужно лишь помнить что никакой другой код не может выполняться пока программа занимается считыванием данных из него и передача может осуществляться только в полудуплексном или симплексном режимах. Так же на программный RX можно назначать только те выводы, которые поддерживают прерывание по смене уровней. На UNO, например, это все цифровые выводы, кроме 13-го. Прежде чем собирать свой проект, проконсультируйтесь с инструкцией к конкретной плате.
Пример использования программного порта:
// Определяем вывод RX
#define RX 8
// Определяем вывод TX
#define TX 9
// Подключаем библиотеку программного UART
#include <SoftwareSerial.h>
// Создаём объект программного UART
SoftwareSerial mySerial(RX, TX);Далее к программному порту нужно обращаться через объект mySerial. Например: mySerial.write(data);.
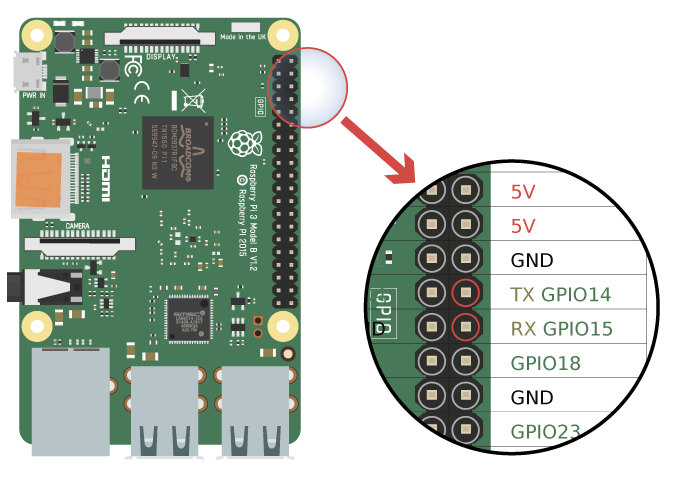
UART на Raspberry Pi:
На Raspberry Pi UART находится на выводах колодки 8 - TX (GPIO14) и 10 - RX (GPIO15)
Перед работой с последовательным портом необходимо его включить. Сделать это можно из эмулятора терминала командой sudo raspi-config -> Interfacing options -> Serial -> No -> Yes -> OK -> Finish или из графической среды в главном меню -> Параметры -> Raspberry Pi Configuration -> Interfaces -> Serial Port
Пример работы с последовательным портом на Python:
# Подключаем модуль для работы с последовательным портом
import serial
# Конфигурируем последовательный порт
serialport = serial.Serial("/dev/ttyS0", 9600, timeout=0.5)
# Выводим байтовую строку в порт
serialport.write(b'iArduino.ru')
# Входим в бесконечный цикл
while True:
# Если буфер порта не пуст
if serialport.in_waiting:
# Записываем данные из буфера в список
response = serialport.readlines()
# Выводим эти данные в stdin, декодируя в UTF-8 и удаляя пустые символы
print(response[0].decode("utf-8").strip())
# Если нужны "сырые данные" с символами возврата каретки и новой строки
# print(response) # .readlines() возвращает список байтовых строкДанный пример выводит строку "iArduino.ru" в последовательный порт Raspberry и ждёт данных из последовательного порта.
Подробнее о UART:
Параметры
При обозначении параметров UART принято использовать короткую запись ЦИФРА-БУКВА-ЦИФРА
- ЦИФРА — количество бит в кадре
- от 5 до 9 бит. Обычно 8.
- БУКВА — наличие и тип бита чётности
- N - None (Отсутствует) без бита чётности
- E - Even (Чётный). Проверка данных на чётность. Перед стоп-битом в кадр добавляется бит: 0 если в кадре было нечётное количество единиц, 1 — если чётное.
- O - Odd (Нечётный). Проверка данных на нечётность. Перед стоп-битом в кадр добавляется бит: 1 если в кадре было нечётное количество единиц, 0 — если чётное.
- ЦИФРА — длительность стоп-бита
- 1, 1.5, 2. Продолжительность стоп-бита (1, 1.5 или 2 битовых интервала)
Таким образом, стандартные настройки в Arduino: 8-N-1
Кадрирование данных
При приёме-передаче данных каждое устройство ориентируется на своё внутреннее тактирование. Обычно это тактирование от 8 до 16 раз быстрее скорости передачи данных и обычно отсчитывается от стартового бита. Именно поэтому необходимо чтобы оба устройства были настроены на одну и ту же скорость передачи.
Так же при передаче данных присутствуют синхронизирующие биты, именуемые старт-бит и стоп-бит. Старт-бит сигнализирует о начале передачи данных и стоп-бит, соответственно об окончании.
Рассмотрим кадр данных:
При разговорах о серийный протоколах принято использовать такие слова как кадр и пакет. Кадр - интервал от старт-бита до стоп-бита. Пакет - количество кадров полезных данных. При этом не стоит путать кадр и байт: байт - это только сами данные, не включающие в себя синхронизирующие и проверочные биты.
Старт-бит:
При отсутствии передачи линия удерживается в состоянии логической единицы (в случае TTL Arduino это 5 вольт или Vcc). Как только передающее устройство притягивает линию к 0 (GND или 0 вольт в случае Arduino), это сигнализирует принимающему устройству о том что сейчас будет передача данных.
_______ ____ ____ ____ ____ ____ ____ ____ ____ __________
\____/____X____X____X____X____X____X____X____X
|
старт-бит [данные .............................] [стоп-бит]
Данные:
При появлении старт-бита на линии принимающее устройство начинает отсчитывать время в соответствии с установленной скоростью и считывать состояния линии через определённые промежутки времени в соответствии с установленным количеством бит данных, после этого.
_______ ____ ____ ____ ____ ____ ____ ____ ____ __________
\____/____X____X____X____X____X____X____X____X
| | | | | | | |
[старт-бит] данные ............................. [стоп-бит]
Стоп-бит:
По завершении передачи данных принимающее устройство ожидает стоп-бит, который должен быть на уровне логической единицы. Если по завершении кадра удерживается логический ноль, значит данные неверны. Если логический ноль удерживается время, превышающее длину кадра в 1,5 раза, такое состояние именуется break (разрыв линии, исторически пошло от устройств, использующих токовую петлю для передачи данных). Некоторые передатчики вызывают это состояния специально перед посылкой пакета данных. Некоторые приёмники считают такое состояние за неправильно выставленную скорость и сбрасывают свои настройки на установки "по умолчанию".
_______ ____ ____ ____ ____ ____ ____ ____ ____ __________
\____/____X____X____X____X____X____X____X____X
|
[старт-бит][данные .............................] стоп-бит
Скорость передачи данных
Скорость изменения логических уровней (импульсов) на линии принято измерять в бодах. Единица измерения названа так в честь французского изобретателя Жана Мориса Эмиля Бодо.
Скорость при использовании UART может быть любой, единственное требование — скорости передающего и принимающего должны быть одинаковы. Стандартная скорость UART принята за 9600 бод. Arduino без проблем и лишних настроек может принимать и передавать данные на скоростях до 115200 бод.
Так как при передаче данных присутствуют синхронизирующие биты, именуемые старт-бит и стоп-бит, не совсем корректно говорить, что скорость 9600 бод равна 9600 битам в секунду. Если речь идёт о полезных данных, то реальная скорость на 20% ниже. Например, если выставлены параметры 8-N-1 и 9600 бод, то на передачу одного байта уходит десять бит, и 9600/10 = 960 байт, что равно 7680 битам в секунду.
Методы связи
UART позволяет одновременно передавать и принимать данные, однако не всегда это возможно или нужно. Например, если Вам нужно только получать не критические данные (которые можно проверить следующим пакетом, например расстояние, посылаемое лидаром каждые несколько сотен миллисекунд) от цифрового датчика или любого другого устройства и не нужно ничего передавать, такой метод называется симплексным. Всего различают три метода связи:
- Полнодуплексная — когда ведущий и ведомый могут одновременно принимать и передавать (одновременная передача в обе стороны)
- Полудуплексная — когда ведущий и ведомый поочерёдно принимают и передают (Поочерёдная передача в обе стороны)
- Симплексная — когда ведущий или ведомый только передают (Передача в одну сторону)