

Введение:
В этом уроке мы дополним робота QUADRUPED модулем ИК-приёмник и будем управлять направлением и скоростью движения робота с помощью ИК-пульта.
Скорость и направление движения робота будет зависеть от нажатой клавиши на пульте. Робот сможет выполнять такие команды как движение вперёд или назад, с заворотом или без, разворот на месте влево или вправо.
Видео:
Waiting...
Нам понадобится:
- Обучающий набор «QUADRUPED» x1 шт.
- Trema ИК-приёмник х1шт;
- ИК-пульт х1шт;
Библиотеки:
Для реализации проекта нам необходимо установить библиотеки:
- Библиотека iarduino_IR_RX - для работы с ИК-приёмниками/передатчиками;
- Библиотеки SoftwareSerial и Servo входят в базовый набор Arduino IDE и не требуют установки.
О том как устанавливать библиотеки, Вы можете ознакомиться на странице Wiki - Установка библиотек в Arduino IDE.
Схема подключения ИК-приёмника:
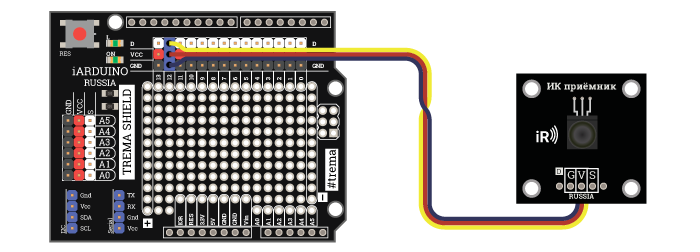
| Trema ИК-приёмник | Trema Shield |
|---|---|
| вывод G | чёрная колодка "Земля" |
| вывод V | красная колодка "+5V" |
| вывод S | 12 цифровой вывод (D10) |
Вы можете изменить вывод D12 для подключения ИК-приёмника на любой другой, указав его в скетче при определении константы IR.
Схема подключения робота QUADRUPED:
Соберите механику, подключите Trema Shield, сервоприводы и откалибруйте робота, как это описано на странице Сборка QUADRUPED. Электроника + Калибровка. Далее на боковую панель установите ИК-приёмник.
| Сервоприводы | Trema Shield | |
|---|---|---|
| 1 конечность | Горизонтальный сустав (№ 0) | вывод 4 на белой колодке |
| Вертикальный сустав (№ 1) | вывод 5 на белой колодке | |
| 2 конечность | Горизонтальный сустав (№ 2) | вывод 6 на белой колодке |
| Вертикальный сустав (№ 3) | вывод 7 на белой колодке | |
| 3 конечность | Горизонтальный сустав (№ 4) | вывод 8 на белой колодке |
| Вертикальный сустав (№ 5) | вывод 9 на белой колодке | |
| 4 конечность | Горизонтальный сустав (№ 6) | вывод 10 на белой колодке |
| Вертикальный сустав (№ 7) | вывод 11 на белой колодке | |
Вы можете изменить выводы 4-11 для подключения сервоприводов на любые другие, указав их в скетче при объявлении массива объектов PIN_SERVO[8]. Трехпроводные шлейфы сервоприводов устанавливаются следующим образом:
- Оранжевый провод подключается к выводу на белой колодке.
- Красный провод подключается к выводу на красной колодке.
- Коричневый провод подключается к выводу на чёрной колодке.
Код программы для чтения сигналов с пульта:
#include "iarduino_IR_RX.h" // Подключаем библиотеку для работы с ИК-приёмником
iarduino_IR_RX IR(12); // Объявляем объект IR и указываем вывод, к которому подключён ИК-приёмник
void setup() {
Serial.begin(9600); // Инициируем передачу данных в монитор порта на скорости 9600 бит/сек
IR.begin(); // Инициируем работу с ИК-приёмником
}
void loop() {
// Если в буфере имеются данные, принятые с пульта (удерживается кнопка), то выводим код нажатой кнопки
if (IR.check(true)) Serial.println(IR.data, HEX);
}
Данный скетч пригодится вам в том случае, если вы решите взять любой другой ИК-пульт вместо нашего. В этом случае вам надо будет определить коды кнопок, используя данный скетч, а затем указать их уже в основном коде QUADRUPED, там где указана функция IR.data.
Код программы для робота QUADRUPED:
#define ROTATION_MOVING 0 // Определяем константу для походки: ПОВОРОТ
#define NORMAL_MOVING 1 // Определяем константу для походки: ОБЫЧНАЯ ХОТЬБА
#define SMOOTH_MOVING 2 // Определяем константу для походки: ПЛАВНАЯ ХОТЬБА
#define GO_LEFT_FORWARD 1 // Определяем константу для движения влево-вверх
#define GO_FORWARD 2 // Определяем константу для движения вверх
#define GO_RIGHT_FORWARD 3 // Определяем константу для движения вправо-вверх
#define GO_LEFT 4 // Определяем константу для движения влево
#define STOP 5 // Определяем константу для движения стоп
#define GO_RIGHT 6 // Определяем константу для движения вправо
#define GO_LEFT_BACKWARD 7 // Определяем константу для движения влево-вниз
#define GO_BACKWARD 8 // Определяем константу для движения вниз
#define GO_RIGHT_BACKWARD 9 // Определяем константу для движения вправо-вниз
#define GO_UP 10 // Определяем константу для положительного изменения высоты
#define GO_DOWN 11 // Определяем константу для отрицательного изменения высоты
#define SPEED_DELAY 8 // Определяем константу обратно пропорциональную скорости движения (чем больше значение, тем медленнее скорость)
#define IR_SIGNAL_WAITING_TIME 100 // Определяем константу времени ожидания прихода пакета от ИК-пульта
#define JOINT_CENTRAL_POS 0 // Определяем константу центрального положения всех суставов
#define HORIZONTAL_JOINT 0 // Определяем константу определения типа суставов: ГОРИЗОНТАЛЬНЫЕ
#define VERTICAL_JOINT 1 // Определяем константу определения типа суставов: ВЕРТИКАЛЬНЫЕ
// Подключаем библиотеки:
#include "Servo.h" // Подключаем библиотеку Servo, для работы с сервоприводами.
#include "iarduino_IR_RX.h" // Подключаем библиотеку для работы с ИК-приёмником
iarduino_IR_RX IR(12); // Объявляем объект IR, с указанием вывода к которому подключён ИК-приёмник
Servo OBJ_SERVO[8]; // Создаём массив, каждый элемент которого является объектом библиотеки Servo. Цифры в комментарии указывают на № сервопривода
// Определяем сервы: Г В Г В Г В Г В // Буквы в комментарии указывают на плоскость вращения сервопривода (Горизонтальная / Вертикальная)
const uint8_t PIN_SERVO[8] = { 4, 5, 6, 7, 8, 9, 10, 11 }; // Определяем массив хранящий номера выводов к которым подключены сервоприводы (можно менять)
const int CENTR_ANGLE[8] = { 49, 111, 104, 126, 109, 129, 74, 131 }; // Определяем массив хранящий углы в градусах, при которых сервоприводы находятся в центральном положении (КОРРЕКТИРУЕТСЯ В КАЛИБРОВОЧНОМ СКЕТЧЕ)
const int MIN_ANGLE[8] = { 50, 30, 50, 30, 50, 30, 50, 30 }; // Определяем массив хранящий углы в градусах, на которые отклоняются сервоприводы от центрального положения назад или вниз
const int MAX_ANGLE[8] = { 50, 40, 50, 40, 50, 40, 50, 40 }; // Определяем массив хранящий углы в градусах, на которые отклоняются сервоприводы от центрального положения вперёд или вверх
// Определяем дополнительные переменные:
uint8_t VarPosition = 0; // Текущая позиция походки от 0 до 255 (чем быстрее меняется значение тем выше скорость)
int8_t VarTurning = 0; // Определяем переменную (поворот ) для пересчета размера шага в градусах поворота сервоприводов (-50 - влево ... 0 - прямо ... +50 вправо)
int8_t VarHeightForMoving = 0; // Определяем переменную высоты корпуса относительно центрального положения для передвижения (0% - нижняя точка, 100% - верхняя точка)
int8_t VarHeightForUpDown = 0; // Определяем переменную высоты корпуса относительно центрального положения для подъёма-опускания корпуса (-100 - нижняя точка, +100 - верхняя точка)
uint8_t Flg = 0; // Флаг нажатой кнопки
uint32_t FlgTime; // Флаг начала отправки пакетов
// Объявляем функции:
void joint_move_func ( uint8_t, bool, int8_t ); // Объявляем Функцию установки одного сустава в значение от -100 до 100
void limb_step_func ( uint8_t, uint8_t, int, int ); // Объявляем Функцию установки одной конечности в положение от 0 до 255
void gait_func ( uint8_t, uint8_t, int, int ); // Объявляем Функцию установки всех конечностей в положение от 0 до 255
void free_limb_func ( void ); // Объявляем Функцию ослабления всех суставов
void centr_limb_func ( void ); // Объявляем Функцию установки всех суставов в центральное положение
void setup(){
// Инициируем работу с ИК-приёмником
IR.begin();
// Освобождаем суставы
free_limb_func();
// Выставляем все конечности в центральное положение
centr_limb_func();
}
void loop(){
// Если с пульта приходят пакеты, то считываем код кнопки, который был нажат
if (IR.check(true)) { // Флаг времени кнопки
if (IR.data == 0xFFA25D) { FlgTime = millis(); Flg = GO_LEFT_FORWARD; }
if (IR.data == 0xFF629D) { FlgTime = millis(); Flg = GO_FORWARD; }
if (IR.data == 0xFFE21D) { FlgTime = millis(); Flg = GO_RIGHT_FORWARD; }
if (IR.data == 0xFF22DD) { FlgTime = millis(); Flg = GO_LEFT; }
if (IR.data == 0xFFC23D) { FlgTime = millis(); Flg = GO_RIGHT; }
if (IR.data == 0xFFE01F) { FlgTime = millis(); Flg = GO_LEFT_BACKWARD; }
if (IR.data == 0xFFA857) { FlgTime = millis(); Flg = GO_BACKWARD; }
if (IR.data == 0xFF906F) { FlgTime = millis(); Flg = GO_RIGHT_BACKWARD; }
if (IR.data == 0xFFB04F) { FlgTime = millis(); Flg = GO_UP; }
if (IR.data == 0xFF9867) { FlgTime = millis(); Flg = GO_DOWN; }
}
// Если millis() переполнен, то сбрасываем флаг в ноль
if (FlgTime > millis()) FlgTime = 0;
// Если пакеты с пульта приходят в течении 100 мс, то
if ((FlgTime + IR_SIGNAL_WAITING_TIME) > millis()) {
// выполняем код в теле оператора каждые SPEED_DELAY миллисекунд
if(millis() % SPEED_DELAY == 0){
switch (Flg) { // Скорость движения Отклонение от центра Функция движения QUADRUPED в плоскости
case GO_LEFT_FORWARD: VarPosition += 2; VarTurning = -50; gait_func( NORMAL_MOVING, VarPosition, VarTurning, VarHeightForMoving); break;
case GO_FORWARD: VarPosition += 2; VarTurning = 0; gait_func( NORMAL_MOVING, VarPosition, VarTurning, VarHeightForMoving); break;
case GO_RIGHT_FORWARD: VarPosition += 2; VarTurning = 50; gait_func( NORMAL_MOVING, VarPosition, VarTurning, VarHeightForMoving); break;
case GO_LEFT: VarPosition -= 2; VarTurning = 0; gait_func( ROTATION_MOVING, VarPosition, VarTurning, VarHeightForMoving); break;
case GO_RIGHT: VarPosition += 2; VarTurning = 0; gait_func( ROTATION_MOVING, VarPosition, VarTurning, VarHeightForMoving); break;
case GO_LEFT_BACKWARD: VarPosition -= 2; VarTurning = -50; gait_func( NORMAL_MOVING, VarPosition, VarTurning, VarHeightForMoving); break;
case GO_BACKWARD: VarPosition -= 2; VarTurning = 0; gait_func( NORMAL_MOVING, VarPosition, VarTurning, VarHeightForMoving); break;
case GO_RIGHT_BACKWARD: VarPosition -= 2; VarTurning = 50; gait_func( NORMAL_MOVING, VarPosition, VarTurning, VarHeightForMoving); break;
// Увеличиваем высоту корпуса если высота больше 100%, то оставить высоту = 100% Переопределяем диапазон высоты для функции движения вверх-вниз
case GO_UP: VarHeightForMoving += 1; if(VarHeightForMoving > 100) VarHeightForMoving = 100; VarHeightForUpDown = map(VarHeightForMoving, 0, 100, 100, -100);
// Задаём в цикле всем вертикальным суставам изменить высоту на значение VarHeightForUpDown (от 100 (нижняя точка) до -100 (верхняя точка))
for (int LimbNumber = 1; LimbNumber < 5; LimbNumber++) joint_move_func(LimbNumber, VERTICAL_JOINT, VarHeightForUpDown); break;
// Уменьшаем высоту корпуса если высота меньше 0%, то оставить высоту = 100% Переопределяем диапазон высоты для функции движения вверх-вниз
case GO_DOWN: VarHeightForMoving -= 1; if(VarHeightForMoving < 0 ) VarHeightForMoving = 0; VarHeightForUpDown = map(VarHeightForMoving, 0, 100, 100, -100);
// Задаём в цикле всем вертикальным суставам изменить высоту на значение VarHeightForUpDown (от 100 (нижняя точка) до -100 (верхняя точка))
for (int LimbNumber = 1; LimbNumber < 5; LimbNumber++) joint_move_func(LimbNumber, VERTICAL_JOINT, VarHeightForUpDown); break;
}
}
}
}
// Функция освобождения конечностей:
void free_limb_func(void){
// В цикле отключаем все сервоприводы и отключаем подачу сигналов на выводы
for(uint8_t ServoNumber = 0; ServoNumber < 8; ServoNumber++){
OBJ_SERVO[ServoNumber].detach();
digitalWrite(PIN_SERVO[ServoNumber],LOW);
}
}
// Функция установки всех суставов конечностей в центральное положение:
void centr_limb_func(void){
// В цикле устанавливаем горизонтальные и вертикальные суставы в центральное положение
for(uint8_t LimbNumber = 1; LimbNumber <= 4; LimbNumber++){
joint_move_func(LimbNumber,HORIZONTAL_JOINT,JOINT_CENTRAL_POS);
joint_move_func(LimbNumber,VERTICAL_JOINT, JOINT_CENTRAL_POS);
}
}
// Функция установки одного сустава конечности в значение от -100 до 100:
// Где «LimbNumber» - номер конечности (1-4), «JointType» - тип сустава (0-гор. / 1-верт.), «JointPos» - положение сустава (-100 - внизу-сзади / +100 - вверху-спереди)
void joint_move_func(uint8_t LimbNumber, bool JointType, int8_t JointPos){
// Определяем № сервопривода по № конечности (LimbNumber-1) и типу сустава (JointType)
uint8_t ServoNumber = (LimbNumber - 1) * 2 + JointType;
// Определяем переменную (k) для хранения экстремумов
int k = 0;
// Определяем переменную (j) для хранения экстремумов
int j = JointPos? CENTR_ANGLE[ServoNumber]:0;
// Находим (k) - максимально допустимое значение для аргумента (JointPos). Находим (j) - максимально допустимый угол в градусах.
if(JointPos > 0){
k = +100;
if( LimbNumber % 2 == 0 || ServoNumber % 2 == 1 ){
j -= MAX_ANGLE[ServoNumber];
} else {
j += MAX_ANGLE[ServoNumber];
}
}
// Находим (k) - минимально допустимое значение для аргумента (JointPos). Находим (j) - минимально допустимый угол в градусах.
if(JointPos < 0){
k = -100;
// для нечётных конечностей
if( LimbNumber % 2 == 1 && ServoNumber % 2 == 0 ){
j -= MIN_ANGLE[ServoNumber];
}
// для чётных конечностей
else {
j += MIN_ANGLE[ServoNumber];
}
}
// Подключаем объект (OBJ_SERVO), работающий с сервоприводом (ServoNumber) к выводу (PIN_SERVO[ServoNumber])
if(!OBJ_SERVO[ServoNumber].attached()) OBJ_SERVO[ServoNumber].attach(PIN_SERVO[ServoNumber]);
// Устанавливаем сервопривод (ServoNumber) в угол, находящийся между центральным положением (CENTR_ANGLE[ServoNumber]) и экстремумом (j)
OBJ_SERVO[ServoNumber].write(map(JointPos, 0, k, CENTR_ANGLE[ServoNumber], j));
}
// Функция установки одной конечности в положение от 0 до 255:
// Где «LimbNumber» - номер конечности (1-4), «LimbPos» - позиция конечности (0-255), «HorizontalJoint» - поворот горизонтального сустава (-100 +100), «VerticalJoint» - высота вертикального сустава (0-100%)
void limb_step_func(uint8_t LimbNumber, uint8_t LimbPos, int HorizontalJoint, int VerticalJoint){
// Определяем переменную для хранения позиции горизонтальной конечности
int LimbHorizMoving;
// Определяем переменную для хранения позиции вертикальной конечности
int LimbVertMoving;
if(LimbPos < 225){LimbHorizMoving = map(LimbPos, 0, 212, +100, -100);}else // Сустав конечности поворачивается назад (+100 >>> -100)
{LimbHorizMoving = map(LimbPos, 225, 255, -100, +100);} // Сустав конечности поворачивается вперёд (-100 >>> +100)
if(LimbPos < 225){LimbVertMoving = -100; }else // Сустав конечности опущен (-100)
if(LimbPos < 235){LimbVertMoving = map(LimbPos, 225, 235, -100, +100);}else // Сустав конечности поднимается вверх (-100 >>> +100)
if(LimbPos < 245){LimbVertMoving = 100; }else // Сустав конечности поднят (+100)
{LimbVertMoving = map(LimbPos, 245, 255, +100, -100);} // Сустав конечности опускается вниз (+100 >>> -100)
// Ограничиваем угол (LimbHorizMoving) горизонтального сустава левых конечностей (поворот влево)
if(HorizontalJoint < 0 && LimbNumber % 2 == 1){
LimbHorizMoving = map(LimbHorizMoving, -100, +100, -(100 + HorizontalJoint) , 100 + HorizontalJoint);
}
// Ограничиваем угол (LimbHorizMoving) горизонтального сустава правых конечностей (поворот вправо)
if(HorizontalJoint > 0 && LimbNumber % 2 == 0){
LimbHorizMoving = map(LimbHorizMoving, -100, +100, -(100 - HorizontalJoint) , 100 - HorizontalJoint);
}
// Ограничиваем угол (LimbVertMoving) вертикального сустава любых конечностей (высота хексапода)
LimbVertMoving = map(LimbVertMoving, -100, +100, (VerticalJoint * ( -2 ) + 100), 100);
// Устанавливаем угол (LimbHorizMoving) для горизонтального сустава конечности (LimbNumber)
joint_move_func(LimbNumber, HORIZONTAL_JOINT, LimbHorizMoving);
// Устанавливаем угол (LimbVertMoving) для вертикального сустава конечности (LimbNumber)
joint_move_func(LimbNumber, VERTICAL_JOINT, LimbVertMoving);
}
// Функция выполнения походки по одному из возможных вариантов i
// Где «LimbMovingType» - номер походки (0-2), «JointPos» - позиция конечности (0-255), «JointHorizMoving» - поворот горизонтальных суставов (-100 +100), «JointVertMoving» - высота вертикального сустава (0-100%)
void gait_func(uint8_t LimbMovingType, uint8_t JointPos, int JointHorizMoving, int JointVertMoving){
// Устанавливаем тип походки
switch(LimbMovingType){
// Походка номер 0: разворот на месте: // pos = 0 63 127 191 255
case ROTATION_MOVING: // | | | | |
limb_step_func(1, 31+JointPos, JointHorizMoving, JointVertMoving); // L | > > > > | > > > > | > > > > | <<< > > | конечность №1 выполняет полный цикл движений (от 255 до 0) быстро возвращаясь в последней тетраде
limb_step_func(2, 0-JointPos, JointHorizMoving, JointVertMoving); // R | >>> < < | < < < < | < < < < | < < < < | конечность №2 выполняет полный цикл движений (от 0 до 255) быстро возвращаясь в первой тетраде
limb_step_func(3, 95+JointPos, JointHorizMoving, JointVertMoving); // L | > > > > | > > > > | <<< > > | > > > > | конечность №3 выполняет полный цикл движений (от 255 до 0) быстро возвращаясь в предпоследней тетраде
limb_step_func(4, 63-JointPos, JointHorizMoving, JointVertMoving); // R | < < < < | >>> < < | < < < < | < < < < | конечность №4 выполняет полный цикл движений (от 0 до 255) быстро возвращаясь во второй тетраде
break; // | | | | |
// Походка номер 1: движение вперёд или назад: // pos = 0 63 127 191 255
case NORMAL_MOVING: // | | | | |
limb_step_func(1, 0+JointPos, JointHorizMoving, JointVertMoving); // L | > > > > | > > > > | > > > > | > > <<< | конечность №1 выполняет полный цикл движений (от 0 до 255) быстро возвращаясь в последней тетраде
limb_step_func(2, 127+JointPos, JointHorizMoving, JointVertMoving); // R | > > > > | > > <<< | > > > > | > > > > | конечность №2 выполняет полный цикл движений (от 0 до 255) быстро возвращаясь во второй тетраде
limb_step_func(3, 63+JointPos, JointHorizMoving, JointVertMoving); // L | > > > > | > > > > | > > <<< | > > > > | конечность №3 выполняет полный цикл движений (от 0 до 255) быстро возвращаясь в предпоследней тетраде
limb_step_func(4, 191+JointPos, JointHorizMoving, JointVertMoving); // R | > > <<< | > > > > | > > > > | > > > > | конечность №4 выполняет полный цикл движений (от 0 до 255) быстро возвращаясь в первой тетраде
break; // | | | | |
// Походка номер 2: плывёт вперёд или назад: // pos = 0 63 127 191 255
case SMOOTH_MOVING: // | | | | |
limb_step_func(1, 0+JointPos, JointHorizMoving, JointVertMoving); // L | > > > > | > > > > | > > > > | > > <<< | конечность №1 выполняет полный цикл движений (от 0 до 255) быстро возвращаясь в последней тетраде
limb_step_func(2, 0+JointPos, JointHorizMoving, JointVertMoving); // R | > > > > | > > > > | > > > > | > > <<< | конечность №2 выполняет полный цикл движений (от 0 до 255) быстро возвращаясь в последней тетраде
limb_step_func(3, 0+JointPos, JointHorizMoving, JointVertMoving); // L | > > > > | > > > > | > > > > | > > <<< | конечность №3 выполняет полный цикл движений (от 0 до 255) быстро возвращаясь в последней тетраде
limb_step_func(4, 0+JointPos, JointHorizMoving, JointVertMoving); // R | > > > > | > > > > | > > > > | > > <<< | конечность №4 выполняет полный цикл движений (от 0 до 255) быстро возвращаясь в последней тетраде
break; // | | | | |
}
}
Значения массива CENTR_ANGLE должны быть изменены (откалиброваны) на действительные углы сервоприводов в градусах, при которых все суставы робота находятся в центральном положении. Это выполняется с использованием калибровочного скетча, как описано на странице Сборка QUADRUPED. Электроника + Калибровка.
Получение данных с пульта
- Данный блок начинается с оператора
ifв условии которого написаноIR.check(true). Это условие верно, если с ИК-пульта приходят пакеты на ИК-приёмник. - Далее следует оператор
ifусловием которого являетсяIR.data ==. Далее указан код кнопки ИК-пульта. Если код совпадает, то выполняется код в теле оператора, код которого совпал с принятым от ИК-пульта. - При выполнении кода в теле оператора
ifтак же обновляется значение счётчика времениFlgTime, который в последствии будет использоваться для ограничения времени на получение пакета (в скетче выше время получения указано ниже в виде(FlgTime + IR_SIGNAL_WAITING_TIME) > millis()).
В данном коде управление роботом осуществляется через функции:
- joint_move_func - установка одного сустава выбранной конечности в значение от -100 до 100.
- Если указать
joint_move_func(4,1,100), то у 4 конечности, вертикальный сустав, поднимется максимально вверх. - Если указать
joint_move_func(4,1,-100), то у 4 конечности, горизонтальный сустав, сдвинется максимально влево.
- Если указать
- limb_step_func - установка одной конечности в положение от 0 до 255.
- Если указать
limb_step_func(4,x,0,50), где x будет увеличиваться от 0 до 255, то 4 конечность совершит следующие действия: плавный сдвиг внизу назад, резкий подъём, быстрый проход сверху вперёд и резкий спуск, остановившись в той же позиции с которой начинались движения. Что похоже на реальное движение лап при движении вперёд. - Если указать
limb_step_func(4,x,0,50), где x будет уменьшаться от 255 до 0, то 4 конечность совершит те же действия, но в обратном порядке. Что похоже на реальное движение лап при движении назад. - Предпоследний аргумент функции можно указывать в пределах от -100 до +100, он будет ограничивать амплитуду движений левых или правых конечностей, что вызовет заворачивание (поворот) влево (-100...0) или вправо (0...+100).
- Последний аргумент функции можно указывать в пределах от 0 до 100, это высота подъёма корпуса в процентах, если указать 0, то QUADRUPED будет «ползти», чем больше значение, тем выше QUADRUPED. Средний подъём корпуса соответствует значению 50.
- Если указать
- gait_func - установка всех конечностей в положение от 0 до 255. Эта функция вызывает предыдущую функцию
limb_step_funcдля каждой конечности, указывая их положение в соответствии с алгоритмом походки.- Если указать
limb_step_fun(1,X,0,50), где x будет увеличиваться от 0 до 255, то все конечности совершат действия при которых QUADRUPED пройдёт вперёд и прямо на один полный шаг, а его конечности вернутся в ту же позицию с которой этот шаг начинался. - Если указать
limb_step_func(1,X,0,50), где x будет уменьшаться от 255 до 0, то все конечности совершат те же действия, но в обратном порядке. Следовательно, QUADRUPED пройдёт тот же шаг но назад. - Если указать
limb_step_func(0,X,0,50), где x будет увеличиваться от 0 до 255, то все конечности совершат действия при которых QUADRUPED выполнит разворот вправо на один полный шаг, а его конечности вернутся в ту же позицию с которой этот разворот начинался. - Последний и предпоследний аргументы выполняют те же действия что и аргументы функции
limb_step_funcтой же позиции, а именно, выполняют заворот (поворот) и поднятие корпуса. - Вы можете дополнить функцию
gait_funcпридумав свои варианты походок.
- Если указать
- free_limp_func - ослабление всех суставов. Функция вызывается без параметров и приводит к отключению сервоприводов. Сервоприводы включатся самостоятельно при вызове любой функции управления суставами или конечностями.
- centr_limb_func - установка всех суставов в центральное положение. Функция вызывается без параметров и устанавливает суставы всех конечностей в положение установленное при калибровке.
Управление:
Управление QUADRUPEDом начинается после того, как на него будет подано питание и все сервоприводы будут выставлены в центральные положения (требуется предварительная калибровка). После этого кнопками пульта со стрелками можно управлять направлением движения робота.

Обсуждение