


")
Введение:
В этом уроке мы установим на робота «Малыш» бампер с 9 датчиками линии, и загрузим скетч, позволяющий роботу ехать по линии.
Нам понадобится:
- Робот «Малыш» в сборе x1 шт.
- Бампер с 9 датчиками линий с шагом 14мм., FLASH-I2C x1 шт.
- iarduino_I2C_Bumper
При необходимости, ознакомьтесь с нашей инструкцией по установке библиотек в Arduino IDE.
Видео:
Установка бампера
Перед подключением не забудьте установить бамперу I2C-адрес (0х0С). Подробно о настройке адресов можно почитать в статье о бампере
Если на вашем роботе установлены датчики линии, снимите их. Все остальные подключения оставьте без изменений!
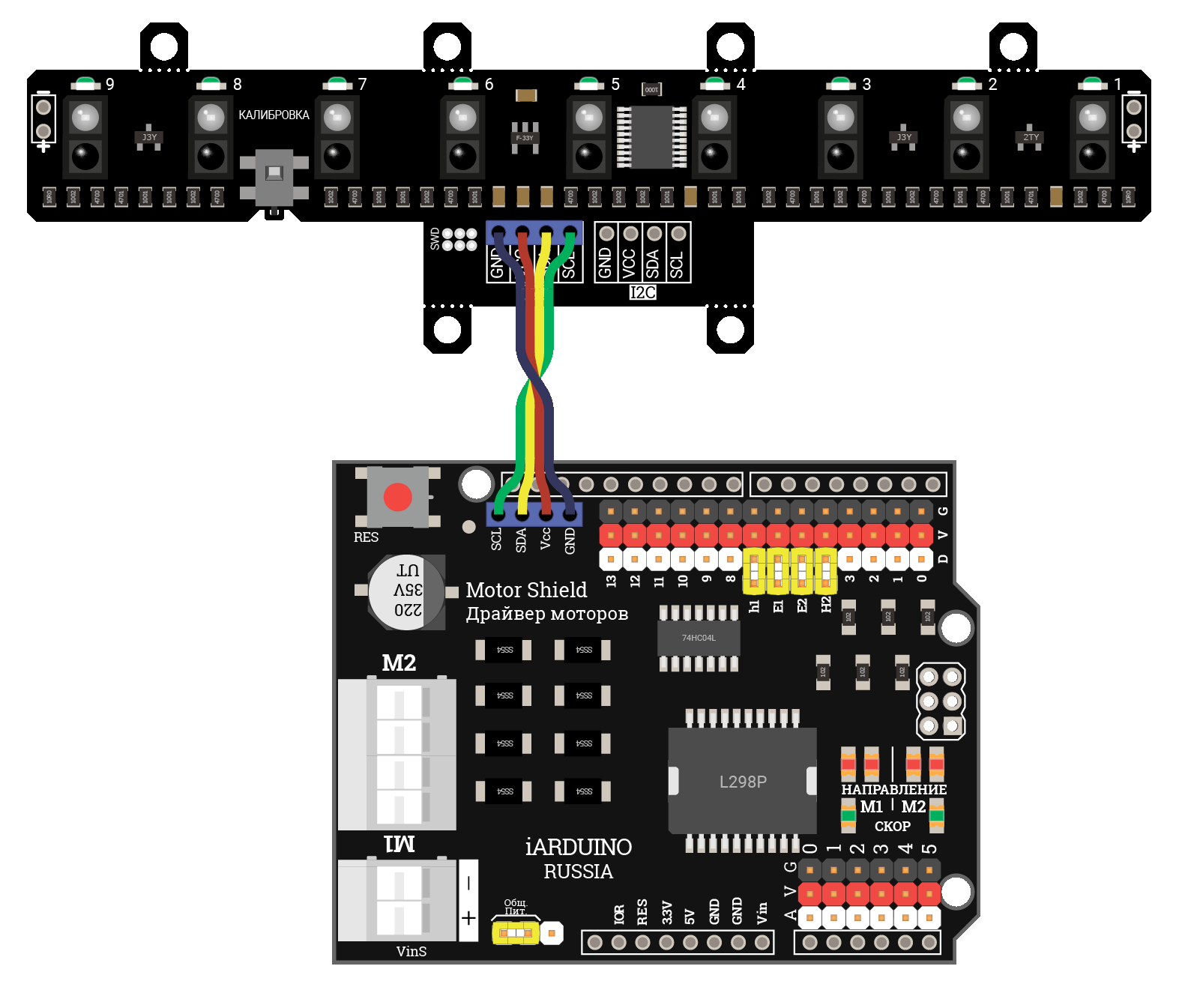
При помощи винтов и гаек устанавливаем бампер на Малыша. Бампер подключается к Motor Shield по шине I2С.
| Бампер с 9 датчиками линии | Motor Shield |
|---|---|
| GND | GND |
| Vcc | Vcc |
| SDA | SDA |
| SCL | SCL |
Скетч
// Подключаем библиотеки: //
#include <Wire.h> // * Подключаем библиотеку для работы с аппаратной шиной I2C.
#include <iarduino_I2C_Bumper.h> // Подключаем библиотеку для работы с бампером I2C-flash.
iarduino_I2C_Bumper bum (0x0C); // Объявляем объект bum для работы с бампером I2C-flash, указав адрес модуля на шине I2C.
const float val_Speed = 130.0f; // Условная скорость движения машины для заполения ШИМ.
const float pid_KP = val_Speed * 0.15f; // Коэффициент пропорциональной обратной связи ПИД регулятора.
const float pid_KI = val_Speed * 0.005f; // Коэффициент интегральной обратной связи ПИД регулятора.
const float pid_KD = val_Speed * 0.15f; // Коэффициент дифференциальной обратной связи ПИД регулятора.
const uint8_t pinH1 = 7; // Создаём константу указывая номер вывода H1 MotorShield (он управляет направлением 1 мотора)
const uint8_t pinE1 = 6; // Создаём константу указывая номер вывода E1 MotorShield (он управляет скоростью 1 мотора)
const uint8_t pinE2 = 5; // Создаём константу указывая номер вывода E2 MotorShield (он управляет скоростью 2 мотора)
const uint8_t pinH2 = 4; // Создаём константу указывая номер вывода H2 MotorShield (он управляет направлением 2 мотора)
uint8_t mSpeed = 0; // Создаём переменную для хранения скорости моторов
bool mDirect = HIGH; // Создаём переменную для хранения направления моторов
float arr_ERR[10] = {0,0,0,0,0,0,0,0,0,0}; // Массив последних ошибок для формирования интегральной составляющей ПИД регулятора.
uint8_t i, j; // Переменные для работы с массивом последних ошибок.
void setup(){
delay(500); // * Ждём завершение переходных процессов связанных с подачей питания.
// ИНИЦИАЛИЗАЦИЯ МОДУЛЕЙ: //
bum. begin(); // Инициируем работу с бампером I2C-flash.
// НАСТРОЙКА МОДУЛЕЙ: //
bum.setTurnPeriod(BUM_TURN_800); // Задать период мигания поворотников равен 800 мс.
bum.setTurnSignal(BUM_TURN_AUTO); // Работа поворотников в автоматическом режиме
bum.settingsTurnAuto(BUM_AUTO_ON_2, BUM_AUTO_OFF_ANY, false); // поворотники работают в автоматическом режиме.
pinMode(pinH1, OUTPUT); digitalWrite(pinH1, LOW); // Конфигурируем вывод pinH1 как выход и устанавливаем на нём уровень логического «0»
pinMode(pinE1, OUTPUT); digitalWrite(pinE1, LOW); // Конфигурируем вывод pinE1 как выход и устанавливаем на нём уровень логического «0»
pinMode(pinE2, OUTPUT); digitalWrite(pinE2, LOW); // Конфигурируем вывод pinE2 как выход и устанавливаем на нём уровень логического «0»
pinMode(pinH2, OUTPUT); digitalWrite(pinH2, LOW); // Конфигурируем вывод pinH2 как выход и устанавливаем на нём уровень логического «0»
digitalWrite(pinH1, mDirect );
digitalWrite(pinH2, mDirect );
}
void loop(){
if( bum.getLineSum() > 4 ){ // Если больше 4 датчиков бампера фиксируют линию, то ...
bum.setLineType(BUM_LINE_CHANGE); // Меняем тип линии трассы.
}
if (!bum.getLineSum()){}
else{
i++; i%=10; j=10; // Определяем значения переменных работы с массивом ошибок.
// Получаем текущую ошибку центрирования линии: //
arr_ERR[i] = bum.getErrPID(); // Функция getErrPID() возвращает ошибку от 0 до ±4.5, где 0 - линия по центру, ±4.0 - линия на крайнем датчике, ±4.5 - линия потеряна.
// Вычисляем все составляющие ПИД регулятора: //
float pid_P = arr_ERR[i]; // Пропорциональная составляющая «pid_P» представлена величиной текущей ошибки «ARR_ERR[i]».
float pid_I = 0.0f; while(j--){pid_I+=arr_ERR[j-1];} // Интегральная составляющая «pid_I» представлена суммой последних ошибок взятых из массива «arr_ERR».
float pid_D = arr_ERR[i]-arr_ERR[(i+9)%10]; // Дифференциальная составляющая «pid_D» представлена разницей между текущей «ARR_ERR[i]» и предыдущей «arr_ERR[(i+9)%10]» ошибкой.
float PID = pid_P*pid_KP+pid_I*pid_KI+pid_D*pid_KD; // Вычисляем результат ПИД регулирования.
// Устанавливаем скорость вращения колёс: //
analogWrite(pinE1, val_Speed + PID);
analogWrite(pinE2, val_Speed - PID);
}
}
Перед началом установки модуля необходимо выполнить калибровку бампера. Подробно о калибровке можно почитать в этой статье.
ПИД-регулятор (пояснения к скетчу)
Для плавного движения робота мы использовали ПИД-регулятор - в данном случае это регулятор скорости вращения мотора с обратной связью, получаемой с датчика линии бампера. Бампер фиксирует величину отклонения машинки от центра.
Функция getErrPID() возвращает ошибку от 0 до ±4.5, где 0 - линия по центру, ±4.0 - линия на крайнем датчике, ±4.5 - линия потеряна. Эти значения записываются в массив ошибок, в котором хранятся последние 10 значений ошибок. Благодаря тому, что мы работаем не с последней ошибкой, а с "историей" ошибок, мы можем судить о том, насколько быстро линия уходит из-под центра датчика, и насколько успешно у машинки получается вернуться к "состоянию равновесия", т.е. достаточное ли управляющее воздействие в данный момент даёт регулятор.
ПИД-регулятор использует для расчёта три составляющие:
- Пропорциональная составляющая: равна последней ошибке, полученной с датчика;
- Интегральная составляющая: равна сумме последних ошибок езды - ошибок из массива;
- Дифференциальная составляющая: равна разнице между текущей ошибкой и предыдущей;
Степень влияния каждой составляющей на регулирование определяется коэффициентами, которые мы указывали в качестве констант. Изменяя их, можно добиться более выраженной реакции машинки на отклонение от линии. Попробуйте поменять их и посмотрите на результат.
После вычисления результата ПИД-регулирования, устанавливается скорость вращения колёс - одно из них замедляется, другое, напротив, ускоряется.

Обсуждение