

Общие сведения:
Trema модуль ИК-приёмник/передатчик, Flash-I2C является устройством для беспроводного обмена данными по ИК-каналу. Модуль позволяет передавать данные на устройства с управлением от ИК пультов ДУ, обмениваться данными с подобными себе модулями и получать данные от ИК пультов ДУ, и модулей линейки «Дорожное движение». Управление модулем ИК-приёмопередатчика осуществляется по шине I2C.
Модуль относится к серии «Flash», а значит к одной шине I2C можно подключить более 100 модулей, так как их адрес на шине I2C (по умолчанию 0x09), хранящийся в энергонезависимой памяти, можно менять программно.
Модуль можно использовать для создания универсального ИК пульта ДУ, управления роботами, машинами, станками бытовыми приборами, а так же модуль можно установить на устройства и управлять ими с ИК пультов ДУ. Модуль можно установить на машину трассы и принимать данные о состоянии светофоров и назначении знаков трассы.
Видео:
Редактируется...
Спецификация:
- Напряжение питания: 3,3 В или 5 В, поддерживаются оба напряжения.
- Ток потребляемый модулем: до 15 мА (при передаче данных).
- Дальность ИК-связи передатчика: от 20 см до 4 м (регулируется вручную).
- Интерфейс: I2C.
- Скорость шины I2C: 100 кбит/с.
- Адрес на шине I2C: устанавливается программно (по умолчанию 0x09).
- Уровень логической 1 на линиях шины I2C: Vcc (толерантны к 5 В).
- Рабочая температура: от -20 до +70 °С.
- Габариты: 30 х 30 мм..
- Вес: 5 г.
Все модули линейки "Trema" выполнены в одном формате

Подключение:
Модуль подключается к аппаратной или программной шине I2C Arduino.
Для удобства подключения, предлагаем воспользоваться TremaShield.
Модуль подключается по шине I2C, все выводы которой (GND, Vcc, SDA, SCL) размещены на одной колодке модуля.
- SCL - вход/выход линии тактирования шины I2C.
- SDA - вход/выход линии данных шины I2C.
- Vcc - вход питания 3,3 или 5 В.
- GND - общий вывод питания.
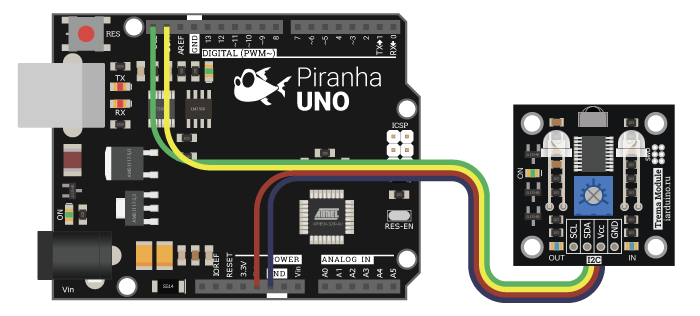
Способ - 1: Используя проводной шлейф и Piranha UNO
Используя провода «Папа — Мама», подключаем напрямую к контроллеру Piranha UNO.
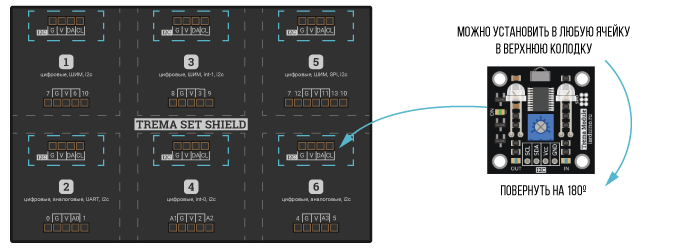
Способ - 2: Используя Trema Set Shield
Модуль можно подключить к любому из I2C входов Trema Set Shield.
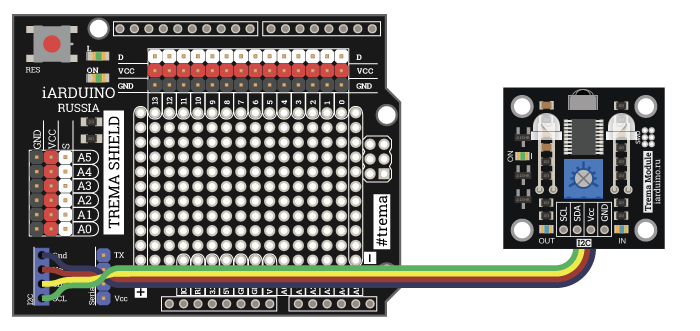
Способ - 3: Используя проводной шлейф и Shield
Используя 4-х проводной шлейф, к Trema Shield, Trema-Power Shield, Motor Shield, Trema Shield NANO и тд.
Способ - 4: Подключение к программной шине I2C
При использовании программной шины I2C, модуль можно подключить к любым выводам Arduino, но потребуется дополнительно установить библиотеку iarduino_I2C_Software.h, для создания программной шины I2C, указав номера выбранных вами выводов. О том как это сделать читайте ниже в разделе «Подключение библиотеки», а так же на странице Wiki - Расширенные возможности библиотек iarduino для шины I2C.
Питание:
Входное напряжение питания модуля 3,3В или 5В постоянного тока (поддерживаются оба напряжения питания), подаётся на выводы Vcc и GND.
Подробнее о модуле:
Модуль построен на базе, микроконтроллера STM32F030F4, снабжён ИК-приёмником, ИК-светодиодом, светодиодами информирующими о приёме и передаче данных по ИК-каналу, регулятором дальности ИК-передатчика, и собственным стабилизатором напряжения.
Модуль способен принимать и передавать данные по ИК-каналу в соответствии с протоколами: NEC, SAMSUNG, SHARP, SIRC12, SIRC15, RC5, RC5X, RC6 и IARDUINO. Все перечисленные протоколы используют пакетную передачу данных, данные в пакете представлены в виде адреса ИК-устройства (не путать с адресом устройства на шине I2C) и команды для него. При получении данных по ИК-каналу, модуль способен самостоятельно определить протокол который был использован для их отправки.
Параметры ИК передатчика:
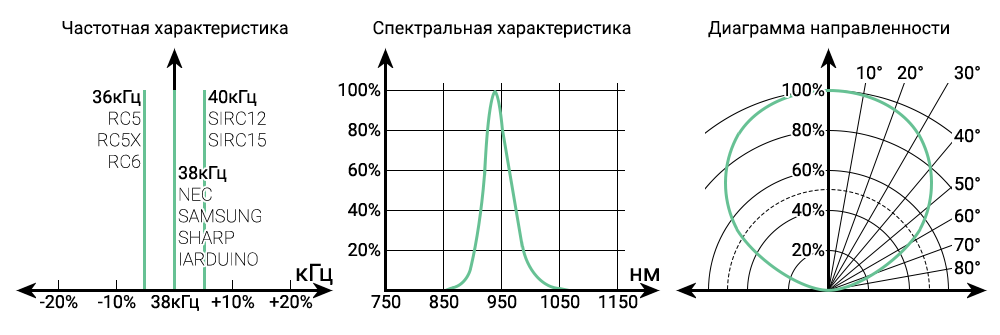
Параметры ИК приёмника:
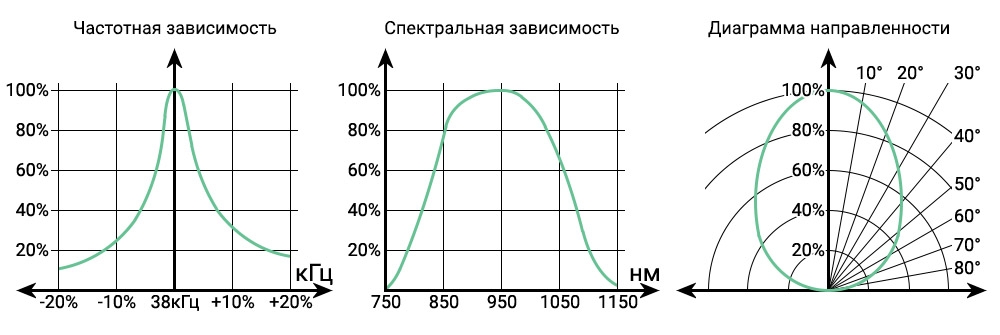
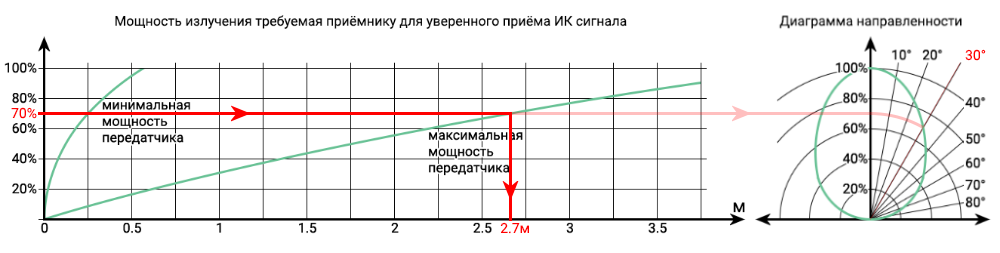
Частотные и спектральные параметры приёмника и передатчика совместимы, а по диаграммам направленности можно определить как снизится уровень ИК сигнала при повороте передатчика или приёмника друг от дура.
Дальность ИК связи зависит от мощности передатчика (настраивается поворотом резистора на плате модуля), и угла поворота приёмника и(или) передатчика друг от друга.
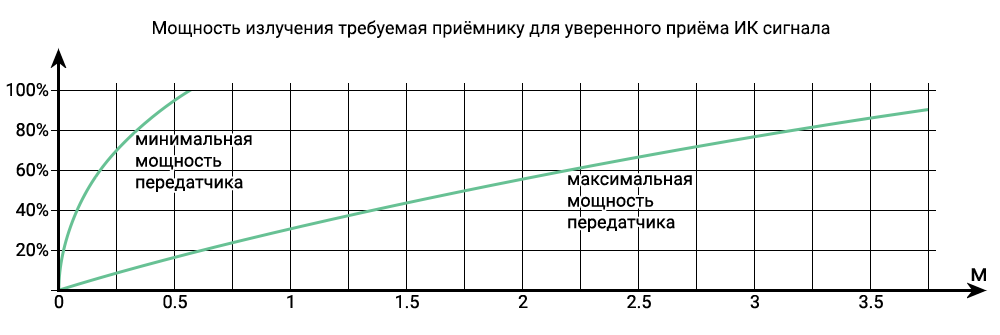
График зависимости требуемой мощности от дистанции, вместе с диаграммами направленности позволяет определить углы и дистанцию уверенного ИК приёма.
Пример:
В данном примере поясняется как пользоваться графиком уверенного ИК приема и диаграммами направленности.
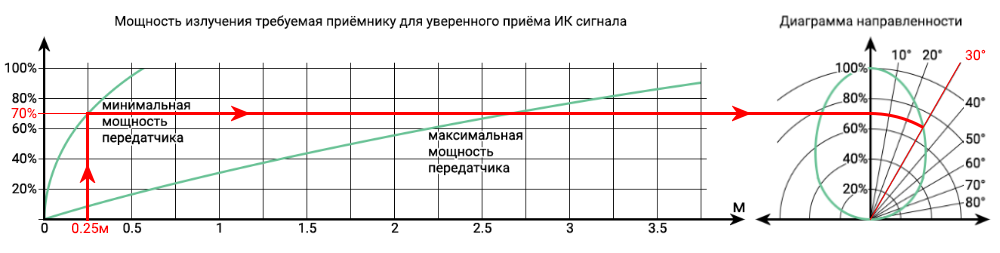
Пояснение 1
Предположим что расстояние между приёмником и передатчиком равно 25см (0.25м), а мощность передатчика установлена в минимум. Тогда необходимо провести вертикальную линию от 0.25м до пересечения с графиком минимальной мощности передатчика, точка касания укажет сколько мощности излучения ИК передатчика должно дойти по ИК приёмника для обеспечения уверенного ИК приёма. В примере (Пояснение 1) это не менее 70%. Из диаграммы направленности приёмника (справа) видно, что для обеспечения указанной мощности, его нельзя отклонять от передатчика более чем на 30°, при условии что сам передатчик направлен точно на приёмник.
Если спроецировать мощность на диаграмму направленности передатчика (Пояснение 2), а не приёмника, то будет видно, что для обеспечения той же мощности (70%), его нельзя отклонять от приёмника более чем на 47°, при условии что сам приёмник направлен точно на передатчик.
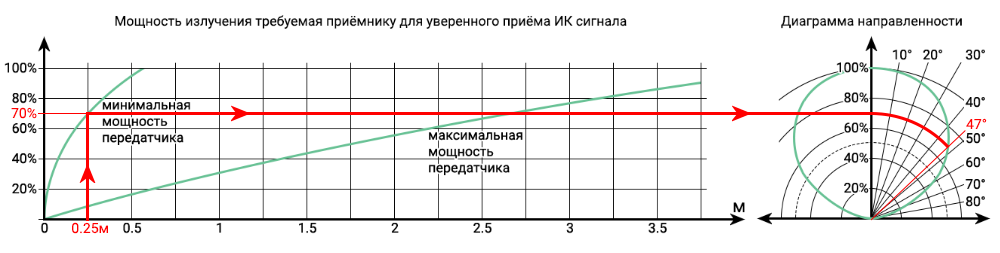
Пояснение 2
По графику уверенного ИК приёма можно определить как увеличится дистанция при обеспечении того же уровня приёма, с теми же углами отклонения, но на максимальной мощности передатчика (Пояснение 3).
Пояснение 3
Для обеспечения того же уровня ИК приёма, до приёмника должно дойти не менее 70% мощности излучения ИК передатчика. Проводим горизонтальную линию от 70% мощности до пересечения с графиком максимальной мощности ИК передатчика, точка касания укажет на дистанцию. В примере (Пояснение 3) это 2.7м.
Модуль позволяет:
- Менять свой адрес на шине I2C.
- Управлять внутренней подтяжкой линий шины I2C (по умолчанию включена).
- Узнать версию прошивки модуля.
- Передать данные по ИК-каналу однократно (одним пакетом).
- Прочитать принятые по ИК-каналу данные.
- Передавать данные автоматически с заданным интервалом между ИК-пакетами повторов.
- При автоматической отправке данных, можно задать режим хаотичной смены интервалов между пакетами (в диапазоне ±50% от заданного), что позволит передавать данные по ИК-каналу от нескольких модулей, в одном направлении, одновременно.
- Выбрать один из 9 доступных протоколов для передачи данных по ИК-каналу.
- Выбрать один из 9 доступных протоколов для получения данных по ИК-каналу.
- Определить наличие пакетов повторов среди принимаемых данных (определить факт удержания кнопки пульта).
- Определить ИК-протокол принимаемых данных.
Для работы с Trema модулем ИК-приёмник/передатчик Flash-I2C, предлагаем воспользоваться разработанной нами библиотекой iarduino_I2C_IR позволяющей реализовать все возможности модуля.
Подробнее про установку библиотеки читайте в нашей инструкции.
Смена адреса модуля на шине I2C:
По умолчанию все модули FLASH-I2C имеют установленный адрес 0х09. Если вы планируете подключать более 1 модуля на шину I2C, необходимо изменить адреса модулей таким образом, чтобы каждый из них был уникальным. Более подробно о том, как изменить адрес, а также о многом другом, что касается работы FLASH-I2C модулей, вы можете прочесть в этой статье.
В первой строке скетча необходимо записать в переменную newAddress адрес, который будет присвоен модулю. После этого подключите модуль к контроллеру и загрузите скетч. Адрес может быть от 0х07 до 0х7F.
uint8_t newAddress = 0x09; // Назначаемый модулю адрес (0x07 < адрес < 0x7F).
//
#include <Wire.h> // Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_IR.
#include <iarduino_I2C_IR.h> // Подключаем библиотеку для работы с Trema модулями ИК-приёмник/передатчик I2C-flash.
iarduino_I2C_IR ir; // Создаём объект ir для работы с функциями и методами библиотеки iarduino_I2C_IR.
// Если при объявлении объекта указать адрес, например, iarduino_I2C_IR ir(0xBB), то пример будет работать с тем модулем, адрес которого был указан.
void setup(){ //
Serial.begin(9600); //
if( ir.begin(&Wire) ){ // Инициируем работу с ИК-приёмником/передатчиком I2C-flash, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire).
Serial.print("Найден модуль 0x"); //
Serial.println( ir.getAddress(), HEX ); // Выводим текущий адрес модуля.
if( ir.changeAddress(newAddress) ){ // Меняем адрес модуля на newAddress.
Serial.print("Адрес изменён на 0x"); //
Serial.println(ir.getAddress(),HEX); // Выводим текущий адрес модуля.
}else{ //
Serial.println("Адрес не изменён!"); //
} //
}else{ //
Serial.println("Модуль не найден!"); //
} //
} //
//
void loop(){} //
Данный пример использует библиотеку iarduino_I2C_IR, которая работает только с модулями ИК-приёмник/передатчик Flash-I2C, а значит позволяет менять только их адреса.
Смена и сортировка адресов на шине I2C:
Изменить адрес любого I2C модуля серии «Flash» можно аппаратно, используя установщик адресов FLASH-I2C. Это модуль подключаемый к шине I2C, на плате которого размещён дисплей и кнопки управления, при помощи которых можно узнать количество любых устройств на шине I2C, и менять адреса модулей Flash-I2C не отключая их от шины, что значительно сократит время сборки ваших проектов. Модуль оснащён разъемом USB через который можно запитать как сам модуль, так и шину I2C, или можно запитать шину I2C без использования разъема USB на плате модуля. Установщик адресов пригодиться в проектах с большим количеством модулей Flash-I2C.
Изменить адрес любого I2C модуля серии «Flash» можно программно, о том как это сделать рассказано в статье Wiki - Программная установка адресов модулей FLASH-I2C. В этой статье рассмотрены примеры с использованием библиотеки iarduino_I2C_Address, которая позволяет получать адреса любых устройств на шине I2C, менять адреса модулей Flash-I2C не отключая их от шины, получать название, номер модели, версию прошивки модулей Flash-I2C, а главное - автоматически сортировать адреса модулей Flash-I2C даже если на шине есть устройства с одинаковыми адресами.
Примеры:
В данном разделе раскрыты примеры управления модулем по шине I2C с использованием библиотеки iarduino_I2C_IR. Сама библиотека содержит больше примеров, доступных из меню Arduino IDE: Файл / Примеры / iarduino_I2C_IR.
Получение данных с ИК пульта ДУ:
В данном примере принимаются данные отправленные ИК пультом ДУ по протоколу NEC.
#include <Wire.h> // Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_IR.
#include <iarduino_I2C_IR.h> // Подключаем библиотеку для работы с ИК-приёмником/передатчиком I2C-flash.
iarduino_I2C_IR ir(0x09); // Создаём объект ir для работы с функциями и методами библиотеки iarduino_I2C_IR, указывая адрес модуля на шине I2C.
// Если объявить объект без указания адреса (iarduino_I2C_IR ir;), то адрес будет найден автоматически.
void setup(){ //
Serial.begin(9600); // Инициируем работу с шиной UART для передачи данных в монитор последовательного порта на скорости 9600 бит/сек.
ir.begin(&Wire); // Инициируем работу с ИК-приёмником/передатчиком I2C-flash, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire).
ir.setProtocol(IR_NEC); // Указываем протокол для приёма/передачи данных по ИК-каналу.
} //
//
void loop(){ //
if( ir.check(true) ){ // Если ИК приёмник получил пакет данных (нажимается кнопка ИК пульта) или пакет повтора (удерживается кнопка ИК пульта).
Serial.print("Адрес="); // Выводим текст.
Serial.print(ir.address); // Выводим принятый адрес ИК-устройства.
Serial.print(", команда="); // Выводим текст.
Serial.print(ir.command); // Выводим принятую команду для ИК-устройства.
Serial.print(", кнопка "); // Выводим текст.
if( ir.key_press ){ // Если функция check() среагировала на первый пакет данных, а не на пакет повтора (кнопка пульта нажимается а не удерживается).
Serial.print("нажимается"); // Выводим текст.
}else{ // Если функция check() среагировала на пакет повтора, а не на первый пакет данных (кнопка пульта удерживается а не нажимается).
Serial.print("удерживается"); // Выводим текст.
} //
Serial.println("."); // Выводим текст.
delay(100); // Ждём 100 мс.
} //
} //
В коде Setup() данного скетча происходит инициализация модуля и указание протокола приёма/передачи данных. Библиотека поддерживает 9 ИК протоколов: IR_NEC, IR_SAMSUNG, IR_SHARP, IR_SIRC12, IR_SIRC15, IR_RC5, IR_RC5X, IR_RC6 и IR_IARDUINO.
В коде loop() постоянно выполняются проверка получения данных по ИК каналу, обращением к функции check(). Данная функция принимает 1 параметр - флаг разрешающий реагировать на пакеты повторов. Если флаг = true, то функция будет реагировать и на нажимание и на удержание кнопок ИК пульта ДУ, если флаг = false (или отсутствует), то функция будет реагировать только на нажатие кнопок.
Если ИК приёмник получил данные по ИК каналу, то функция check() вернёт true и скетч выведет следующие данные: address - адрес ИК устройства отправленный пультом ДУ, command - команда ИК устройству отправленная пультом, и key_press - флаг указывающий что кнопка ИК пульта ДУ только что нажата, а не удерживается.
Отправка данных по ИК каналу:
Пример имитирует нажатие одной и той же кнопки ИК пульта ДУ с её удержанием на 5 секунд в нажатом состоянии и отпусканием на 5 секунд.
#include <Wire.h> // Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_IR.
#include <iarduino_I2C_IR.h> // Подключаем библиотеку для работы с Trema модулями ИК-приёмник/передатчик I2C-flash.
iarduino_I2C_IR ir(0x09); // Создаём объект ir для работы с функциями и методами библиотеки iarduino_I2C_IR, указывая адрес модуля на шине I2C.
// Если объявить объект без указания адреса (iarduino_I2C_IR ir;), то адрес будет найден автоматически.
void setup(){ //
ir.begin(&Wire); // Инициируем работу с ИК-приёмником/передатчиком I2C-flash, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire).
ir.setProtocol(IR_RC5); // Указываем протокол для приёма/передачи данных по ИК-каналу.
} //
//
void loop(){ //
// Указываем модулю отправлять ИК пакеты: //
ir.autoSend(0x01, 0x10); // Указываем модулю отправить пакет данных (байт адреса 0x01 и байт команды 0x10) и автоматически отправлять пакеты повторов пока не будет вызван метод ir.autoStop().
delay(5000); // Ждём 5 секунд. Всё это время модуль будет отправлять данные, как при удержании кнопки ИК пульта ДУ.
// Останавливаем отправку ИК пакетов: //
ir.autoStop(); // Указываем модулю прекратить отправку пакетов.
delay(5000); // Ждём 5 секунд.
} //
В коде Setup() данного скетча происходит инициализация модуля и указание протокола приёма/передачи данных. Библиотека поддерживает 9 ИК протоколов: IR_NEC, IR_SAMSUNG, IR_SHARP, IR_SIRC12, IR_SIRC15, IR_RC5, IR_RC5X, IR_RC6 и IR_IARDUINO.
В коде loop() постоянно выполняется имитация нажатия и отпускания кнопки ИК пульта ДУ. Протоколы поддерживаемые библиотекой определяют, что передача данных осуществляется пакетами в состав которых входят значения адреса ИК устройства (в примере 0x01) и команды для ИК устройства (в примере 0x10). С задачей передачи этих данных справляется функция autoSend() которая принимает значения адреса и команды, и указывает модулю самостоятельно передавать эти данные пока не будет вызвана функция autoStop().
Если задержку после обращения к функции autoSend() сократить до 100 мс, то данный скетч будет передавать данные так же как и следующий ниже, так как за 100 мс модуль успеет отправить только один пакет ИК данных по протоколу IR_RC5.
Отправка данных по ИК каналу:
Пример имитирует кратковременные нажатия одной и той же кнопки ИК пульта ДУ, с паузами между нажатиями в 5 секунд.
#include <Wire.h> // Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_IR.
#include <iarduino_I2C_IR.h> // Подключаем библиотеку для работы с Trema модулями ИК-приёмник/передатчик I2C-flash.
iarduino_I2C_IR ir(0x09); // Создаём объект ir для работы с функциями и методами библиотеки iarduino_I2C_IR, указывая адрес модуля на шине I2C.
// Если объявить объект без указания адреса (iarduino_I2C_IR ir;), то адрес будет найден автоматически.
void setup(){ //
ir.begin(&Wire); // Инициируем работу с ИК-приёмником/передатчиком I2C-flash, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire).
ir.setProtocol(IR_RC5); // Указываем протокол для приёма/передачи данных по ИК-каналу.
} //
//
void loop(){ //
// Указываем модулю отправить один ИК пакет: //
ir.send(0x01, 0x10); // Указываем модулю однократно отправить один пакет данных (байт адреса 0x01 и байт команды 0x10).
ir.wait(); // Ждём завершения отправки ИК пакета функцией send().
delay(5000); // Ждём 5 секунд.
} //
В коде Setup() данного скетча происходит инициализация модуля и указание протокола приёма/передачи данных. Библиотека поддерживает 9 ИК протоколов: IR_NEC, IR_SAMSUNG, IR_SHARP, IR_SIRC12, IR_SIRC15, IR_RC5, IR_RC5X, IR_RC6 и IR_IARDUINO.
В коде loop() выполняется обращение к функции send(), каждые 5 секунд. Данная функция передаёт только один пакет с указанными данными в соответствии с определённым ранее ИК протоколом. После функции send() выполняется обращение к функции wait(), которая приостанавливает скетч до завершения отправки данных по ИК-каналу. Эту функцию в данном скетче можно не вызывать. Но она может пригодится в тех случаях, когда требуется отправить несколько разных пакетов друг за другом.
Определение ИК протокола получаемых данных:
Пример ждёт получение любых данных, определяет ИК протокол по которому они были отправлены, выводит название протокола в монитор и далее принимает данные отправленные только в этом протоколе.
#include <Wire.h> // Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_IR.
#include <iarduino_I2C_IR.h> // Подключаем библиотеку для работы с Trema модулями ИК-приёмник/передатчик I2C-flash.
iarduino_I2C_IR ir(0x09); // Создаём объект ir для работы с функциями и методами библиотеки iarduino_I2C_IR, указывая адрес модуля на шине I2C.
// Если объявить объект без указания адреса (iarduino_I2C_IR ir;), то адрес будет найден автоматически.
void setup(){ //
Serial.begin(9600); // Инициируем работу с шиной UART для передачи данных в монитор последовательного порта на скорости 9600 бит/сек.
ir.begin(&Wire); // Инициируем работу с ИК-приёмником/передатчиком I2C-flash, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire).
Serial.println("Нажмите кнопку пульта"); // Выводим текст.
Serial.println("не менее чем на 0,5 сек."); // Выводим текст.
// Указываем модулю искать ИК-протокол: //
ir.seeProtocol_RX(); // Переводим ИК приёмник в режим определения протокола получаемых данных.
// Ждём обнаружение ИК-протокола: //
while(ir.getProtocol_RX()==IR_UNDEFINED){;} // Выполняем цикл while пока ИК-протокол приёмника не станет отличным от значения IR_UNDEFINED.
// Далее код выполнится если протокол найден: //
uint8_t i = ir.getProtocol_RX(); // Сохраняем ИК протокол обнаруженный приёмником в переменную i.
Serial.print("Обнаружен протокол "); // Выводим текст.
switch( i ){ //
case IR_NEC: Serial.print("NEC"); break; // Обнаружен протокол NEC.
case IR_SAMSUNG: Serial.print("SAMSUNG"); break; // Обнаружен протокол SAMSUNG.
case IR_SHARP: Serial.print("SHARP"); break; // Обнаружен протокол SHARP.
case IR_SIRC12: Serial.print("SIRC12"); break; // Обнаружен протокол SONY.
case IR_SIRC15: Serial.print("SIRC15"); break; // Обнаружен протокол SONY.
case IR_RC5: Serial.print("RC5"); break; // Обнаружен протокол PHILIPS.
case IR_RC5X: Serial.print("RC5X"); break; // Обнаружен протокол PHILIPS.
case IR_RC6: Serial.print("RC6"); break; // Обнаружен протокол PHILIPS.
case IR_IARDUINO: Serial.print("IARDUINO"); break; // Обнаружен протокол IARDUINO.
} Serial.print(".\r\n"); //
// ir.setProtocol( i, ir.modeRC6 ); // Указываем использовать обнаруженный ИК протокол не только для приёма, но и для передачи данных по ИК-каналу.
} //
//
void loop(){ //
if( ir.check(true) ){ // Если ИК приёмник получил пакет данных (нажимается кнопка ИК пульта) или пакет повтора (удерживается кнопка ИК пульта).
Serial.print("Адрес="); // Выводим текст.
Serial.print(ir.address); // Выводим принятый адрес ИК-устройства.
Serial.print(", команда="); // Выводим текст.
Serial.print(ir.command); // Выводим принятую команду для ИК-устройства.
Serial.println("."); // Выводим текст.
delay(100); // Ждём 100 мс.
} //
} //
В коде Setup() данного скетча происходит инициализация модуля, далее обращением к функции seeProtocol_RX() модуль переходит в режим чтения ИК протокола. Функция getProtocol_RX() возвращает ИК протокол используемый ИК приёмником, но пока тот не получит данные по ИК-каналу и не определит их протокол, функция getProtocol_RX() будет возвращать IR_UNDEFINED. Как только протокол будет обнаружен, он будет выведен в монитор. Последняя строка кода setup() позволяет применить обнаруженный приёмником протокол и для передатчика, указав его в качестве первого аргумента функции setProtocol() или setProtocol_TX(), эта строка закомменторована, так как в данном примере передатчик не используется.
В коде loop() постоянно выполняются проверка получения данных по ИК каналу, обращением к функции check(). Данная функция принимает 1 параметр - флаг разрешающий реагировать на пакеты повторов. Если флаг = true, то функция будет реагировать и на нажимание и на удержание кнопок ИК пульта ДУ, если флаг = false (или отсутствует), то функция будет реагировать только на нажатие кнопок.
Если ИК приёмник получил данные по ИК каналу, то функция check() вернёт true и скетч выведет значение address - адрес ИК устройства отправленный пультом ДУ и command - команда ИК устройству отправленная пультом.
Получение данных от модулей линейки «Дорожное движение»:
Пример выводит номер знака, команду встречного автомобиля, или разрешённые светофором направления, при обнаружении данных от соответствующих модулей линейки «дорожное движение». Дополнительно в примере реализована постоянная отправка данных, как от автомобиля трассы, для информирования других автомобилей о своём присутствии.
#include <Wire.h> // Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_IR.
#include <iarduino_I2C_IR.h> // Подключаем библиотеку для работы с Trema модулями ИК-приёмник/передатчик I2C-flash.
iarduino_I2C_IR ir(0x09); // Создаём объект ir для работы с функциями и методами библиотеки iarduino_I2C_IR, указывая адрес модуля на шине I2C.
// Если объявить объект без указания адреса (iarduino_I2C_IR ir;), то адрес будет найден автоматически.
void setup(){ //
Serial.begin(9600); // Инициируем работу с шиной UART для передачи данных в монитор последовательного порта на скорости 9600 бит/сек.
ir.begin(&Wire); // Инициируем работу с ИК-приёмником/передатчиком I2C-flash, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire).
ir.setProtocol(IR_IARDUINO); // Указываем протокол для приёма/передачи данных по ИК-каналу.
// Отправляем данные другим автомобилям: //
// ir.setInterval_TX(200, true); // Указываем модулю использовать интервал между пакетами передаваемых данных в 200 мс, разрешая менять его при передаче в пределах ±50%.
// ir.autoSend(MODUL_CAR, 10); // Указываем модулю постоянно отправлять данные с адресом MODUL_CAR и командой 10, пока не будет вызван метод ir.autoStop().
} // В качестве команды автомобиля (вместо 10) можно указывать любое число от 0 до 255.
void loop(){
// Если приняты данные:
if( ir.check(true) ){
// Если данные приняты от автомобиля:
if( ir.device==MODUL_CAR ){
Serial.print("Автомобиль: принята команда ");
Serial.print(ir.command); // Выводим номер команды.
Serial.println(".");
}
// Если данные приняты от дорожного знака:
if( ir.device==MODUL_SIGN ){
Serial.print("Дорожный знак: ");
Serial.print(ir.sign_str); // Выводим строку с номером знака.
if( ir.sign_tab ){
Serial.print(", под знаком есть табличка - ");
if( ir.sign_tab==SIGN_CAR_TRUCK ){ Serial.print("грузовые автомобили"); }
if( ir.sign_tab==SIGN_CAR_LIGHT ){ Serial.print("легковые автомобили"); }
if( ir.sign_tab==SIGN_DISTANCE_050 ){ Serial.print("50 метров"); }
if( ir.sign_tab==SIGN_DISTANCE_100 ){ Serial.print("100 метров"); }
if( ir.sign_tab==SIGN_DISTANCE_150 ){ Serial.print("150 метров"); }
if( ir.sign_tab==SIGN_DISTANCE_200 ){ Serial.print("200 метров"); }
if( ir.sign_tab==SIGN_DISTANCE_250 ){ Serial.print("250 метров"); }
}
Serial.println(".");
}
// Если данные приняты от светофора:
if( ir.device==MODUL_TLIGHT ){
Serial.print("Светофор: регулирует перекрёсток c движением ");
if( ir.track_L ){ Serial.print("налево, " ); }
if( ir.track_R ){ Serial.print("направо, " ); }
if( ir.track_F ){ Serial.print("прямо, " ); }
Serial.print("сейчас сигналы светофора указывают");
Serial.print(": прямо ");
switch(ir.forvard){
case 0: Serial.print("нельзя" ); break;
case 1: Serial.print("можно" ); break;
case 2: Serial.print("можно если нет помех"); break;
}
Serial.print(", направо ");
switch(ir.right){
case 0: Serial.print("нельзя" ); break;
case 1: Serial.print("можно" ); break;
case 2: Serial.print("можно если нет помех"); break;
}
Serial.print(", налево ");
switch(ir.left){
case 0: Serial.print("нельзя" ); break;
case 1: Serial.print("можно" ); break;
case 2: Serial.print("можно если нет помех"); break;
}
Serial.println(".");
}
}
}
В коде Setup() данного скетча происходит инициализация модуля и указание протокола приёма/передачи данных. Библиотека поддерживает 9 ИК протоколов: IR_NEC, IR_SAMSUNG, IR_SHARP, IR_SIRC12, IR_SIRC15, IR_RC5, IR_RC5X, IR_RC6 и IR_IARDUINO.
Далее следуют две закомментированные строки. Если их раскомментировать, то автомобиль будет постоянно передавать адрес команду 10 другим автомобилям.
Обращением к функции setInterval_TX() настраивается интервал между отправляемыми ИК пакетами, а обращением к функции autoSend() отправляются данные (адрес MODUL_CAR и команда 10). Так как в примере нет функции autoStop(), то данные будут отправляться модулем постоянно. Допускается менять отправляемые данные новыми обращениями к функции autoSend() без вызова функции autoStop().
В качестве команд отправляемых автомобилями можно указывать значения от 0 до 255. Вы сами можете придумать какая команда что значит (внимание, уступи дорогу, остановись, уступаю дорогу, поворачиваю влево, еду прямо, еду быстро, еду медленно и т.д.).
В коде loop() постоянно выполняется проверка получения данных по ИК каналу if( ir.check(true) ). Если данные получены, то выполняются проверки: не отправлены ли эти данные автомобилем if( ir.device==MODUL_CAR ), не отправлены ли эти данные модулем «дорожный знак» if( ir.device==MODUL_SIGN ), не отправлены ли эти данные модулем «светофор» if( ir.device==MODUL_TLIGHT ). Если пройдена любая из указанных проверок, то выводятся соответствующие данные:
Автомобиль: принята команда 10. Дорожный знак: 2.4, под знаком есть табличка - грузовые автомобили. Светофор: регулирует перекрёсток c движением направо, прямо, сейчас сигналы светофора указывают: прямо нельзя, направо можно, налево нельзя.
Переменные ir.forvard, ir.right и ir.left разрешающие движение на светофоре могут принимать значения: 0 - движение запрещено, 1 - движение разрешено, или 2 - можно если нет помех. Последнее означает что светофор "сломан" (постоянно мигает жёлтый) или разрешается поворот налево по основному зелёному сигналу светофора у которого нет секции поворота налево.
Описание функций библиотеки:
В данном разделе описаны функции библиотеки iarduino_I2C_IR для работы с Trema модулями ИК-приёмник/передатчик, Flash-I2C.
Библиотека iarduino_I2C_IR может использовать как аппаратную, так и программную реализацию шины I2C. О том как выбрать тип шины I2C рассказано ниже в разделе «Подключение библиотеки», а так же на странице Wiki - расширенные возможности библиотек iarduino для шины I2C.
Подключение библиотеки:
- Если используется аппаратная шина I2C:
#include <Wire.h> // Подключаем библиотеку для работы с аппаратной шиной I2C, до подключения библиотеки iarduino_I2C_IR.h
#include <iarduino_I2C_IR.h> // Подключаем библиотеку для работы с модулем.
//
iarduino_I2C_IR ir(0x09); // Создаём объект ir для работы с функциями и методами библиотеки iarduino_I2C_IR, указывая адрес модуля на шине I2C.
// iarduino_I2C_IR ir; // Если адрес модуля не известен, то его можно не указывать, он будет найден автоматически.
// Если адрес не указан, то на шине должен находиться только один модуль.
void setup(){ //
... //
ir.begin(&Wire); // Инициируем работу с модулем, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire).
... // Доступны объекты: &Wire, &Wire1, &Wire2...
} //
- Если используется программная шина I2C:
#include <iarduino_I2C_Software.h> // Подключаем библиотеку для работы с программной шиной I2C, до подключения библиотеки iarduino_I2C_IR.h
SoftTwoWire sWire(3,4); // Создаём объект программной шины I2C указав выводы которым будет назначена роль линий: SDA, SCL.
//
#include <iarduino_I2C_IR.h> // Подключаем библиотеку для работы с модулем.
iarduino_I2C_IR ir(0x09); // Создаём объект ir для работы с функциями и методами библиотеки iarduino_I2C_IR, указывая адрес модуля на шине I2C.
// iarduino_I2C_IR ir; // Если адрес модуля не известен, то его можно не указывать, он будет найден автоматически.
// Если адрес не указан, то на шине должен находиться только один модуль.
void setup(){ //
... //
ir.begin(&sWire); // Инициируем работу с модулем, указав ссылку на объект для работы с шиной I2C на которой находится модуль (по умолчанию &Wire).
... //
} //
- В обоих примерах сначала подключается библиотека для работы с шиной I2C. Для аппаратной шины библиотека
Wire.h(предустановлена в Arduino IDE), а для программной шины библиотека iarduino_I2C_Software.h, с созданием объекта которому указываются выбранные вами выводы шины, в примере выводы(3-SDA, 4-SCL). - Далее подключается библиотека и создаётся объект для работы с модулем.
- В коде
Setup(), при инициализации работы с модулем указывается ссылка на объект работы с выбранной шиной I2Cbegin(&ШИНА). Остальные строки кода одинаковы для любой шины I2C.
Функция begin();
- Назначение: Инициализация работы с модулем.
- Синтаксис: begin();
- Параметры:
- &ШИНА - Ссылка на объект для работы с шиной I2C на которой находится модуль.
- Для аппаратной шины: &Wire, &Wire1, &Wire2..., если подключена библиотека Wire.h
- Для программной шины: ссылка на объект библиотеки iarduino_I2C_Software.h.
- Параметр является не обязательным, по умолчанию используется ссылка &Wire.
- Возвращаемое значение: bool - результат инициализации (true или false).
- Примечание: По результату инициализации можно определить наличие модуля на шине.
- Пример:
if( ir.begin() ){ Serial.print( "Модуль найден и инициирован!" ); }
else { Serial.print( "Модуль не найден на шине I2C" ); }
Функция reset();
- Назначение: Перезагрузка модуля.
- Синтаксис: reset();
- Параметры: Нет.
- Возвращаемое значение: bool - результат перезагрузки (true или false).
- Пример:
if( ir.reset() ){ Serial.print( "Модуль перезагружен" ); }
else { Serial.print( "Модуль не перезагружен" ); }
Функция changeAddress();
- Назначение: Смена адреса модуля на шине I2C.
- Синтаксис: changeAddress( АДРЕС );
- Параметры:
- uint8_t АДРЕС - новый адрес модуля на шине I2C (целое число от 0x08 до 0x7E)
- Возвращаемое значение: bool - результат смены адреса (true или false).
- Примечание: Текущий адрес модуля можно узнать функцией getAddress().
- Пример:
if( ir.changeAddress(0x12) ){ Serial.print( "Адрес модуля изменён на 0x12" ); }
else { Serial.print( "Не удалось изменить адрес" ); }
Функция getAddress();
- Назначение: Запрос текущего адреса модуля на шине I2C.
- Синтаксис: getAddress();
- Параметры: Нет.
- Возвращаемое значение: uint8_t АДРЕС - текущий адрес модуля на шине I2C (от 0x08 до 0x7E)
- Примечание: Функция может понадобиться если адрес модуля не указан при создании объекта, а обнаружен библиотекой.
- Пример:
Serial.print( "Адрес модуля на шине I2C = 0x"); Serial.println( ir.getAddress(), HEX );
Функция getVersion();
- Назначение: Запрос версии прошивки модуля.
- Синтаксис: getVersion();
- Параметры: Нет
- Возвращаемое значение: uint8_t ВЕРСИЯ - номер версии прошивки от 0 до 255.
- Пример:
Serial.print( "Версия прошивки модуля "); Serial.println( ir.getVersion(), HEX );
Функция setPullI2C();
- Назначение: Управление внутрисхемной подтяжкой линий шины I2C.
- Синтаксис: setPullI2C( [ФЛАГ] );
- Параметры:
- bool ФЛАГ требующий установить внутрисхемную подтяжку линий шины I2C (true или false).
- Возвращаемое значение:
- bool - результат включения / отключения внутрисхемной подтяжки (true или false).
- Примечание:
- Вызов функции без параметра равносилен вызову функции с параметром true - установить.
- Флаг установки внутрисхемной подтяжки сохраняется в энергонезависимую память модуля, а значит будет действовать и после отключения питания.
- Внутрисхемная подтяжка линий шины I2C осуществляется до уровня 3,3 В, но допускает устанавливать внешние подтягивающие резисторы и иные модули с подтяжкой до уровня 3,3 В или 5 В, вне зависимости от состояния внутрисхемной подтяжки модуля.
- Пример:
if( ir.setPullI2C(true ) ){ Serial.print( "Внутрисхемная подтяжка установлена." ); }
if( ir.setPullI2C(false) ){ Serial.print( "Внутрисхемная подтяжка отключена." ); }
Функция getPullI2C();
- Назначение: Запрос состояния внутрисхемной подтяжки линий шины I2C.
- Синтаксис: getPullI2C();
- Параметры: Нет.
- Возвращаемое значение: bool - ФЛАГ включения внутрисхемной подтяжки (true или false).
- Пример:
if( ir.getPullI2C() ){ Serial.print( "Внутрисхемная подтяжка включена." ); }
else { Serial.print( "Внутрисхемная подтяжка отключена." ); }
Функция setProtocol();
- Назначение: Указание ИК-протокола для приёма и передачи данных.
- Синтаксис: setProtocol( ПРОТОКОЛ [,РЕЖИМ] );
- Параметры:
- uint8_t ПРОТОКОЛ - может принимать одно из следующих значений:
- IR_NEC - кодирование длинной паузы. Пакет отправляется за 68 мс.
- IR_SAMSUNG - кодирование длинной паузы. Пакет отправляется за 53...71 мс.
- IR_IARDUINO - кодирование длинной паузы. Пакет отправляется за 26 мс.
- IR_SHARP - кодирование длинной паузы. Пакет отправляется за 16...30 мс.
- IR_SIRC12 - кодирование длинной импульса. Пакет отправляется за 17...25 мс.
- IR_SIRC15 - кодирование длинной импульса. Пакет отправляется за 21...30 мс.
- IR_RC5 - бифазное кодирование. Пакет отправляется за 25 мс.
- IR_RC5X - бифазное кодирование. Пакет отправляется за 25 мс.
- IR_RC6 - бифазное кодирование. Пакет отправляется за 23 мс.
- uint8_t РЕЖИМ - необязательный параметр, указывается только для протокола IR_RC6 и определяет режим данного протокола от 0 до 7. Если указать протокол IR_RC6 без параметра РЕЖИМ, то будет использован режим номер 0.
- Возвращаемое значение: bool - результат применения нового протокола (true или false).
- Примечание:
- Функция устанавливает протокол для приёма и передачи данных по ИК-каналу.
- Модуль позволяет установить разные протоколы для приёма и передачи данных, для этого в библиотеке есть две функции с теми же параметрами:
- setProtocol_TX( ПРОТОКОЛ [,РЕЖИМ] ); - установка протокола для передачи данных.
- setProtocol_RX( ПРОТОКОЛ [,РЕЖИМ] ); - установка протокола для приёма данных.
- ИК-приёмник модуля не будет реагировать на данные отправленные по другому протоколу.
- Пример:
ir.setProtocol(IR_IARDUINO); // Указываем ИК-протокол IR_IARDUINO для приёма и передачи данных. ir.setProtocol(IR_RC6, 2); // Указываем ИК-протокол IR_RC6 и режим 2 для приёма и передачи данных.
Функция getProtocol();
- Назначение: Запрос ИК-протокола используемого для приёма и передачи данных.
- Синтаксис: getProtocol();
- Параметры: Нет.
- Возвращаемое значение: uint8_t ПРОТОКОЛ - может принимать одно из следующих значений:
- IR_UNDEFINED - протокол не определён.
- IR_NEC.
- IR_SAMSUNG.
- IR_IARDUINO.
- IR_SHARP.
- IR_SIRC12.
- IR_SIRC15.
- IR_RC5.
- IR_RC5X.
- IR_RC6.
- Примечание:
- Функция возвращает ИК протокол используемый для приёма и передачи данных по ИК-каналу. Если протокол используемый для приёма данных отличается от протокола используемого для передачи данных, то функция вернёт IR_UNDEFINED.
- Модуль позволяет запросить ИК протокол используемый для приёма или для передачи данных, для этого в библиотеке есть две функции:
- getProtocol_TX(); - запрос протокола используемого для передачи данных.
- getProtocol_RX(); - запрос протокола используемого для приёма данных.
- Если для приёма или передачи данных используется протокол IR_RC6, то режим данного протокола будет доступен из переменной modeRC6, после обращения к любой из функций запроса протокола.
- Пример:
uint8_t i = ir.getProtocol(); // Запрос ИК-протокола используемого для приёма и передачи данных. uint8_t j = ir.getProtocol_TX(); // Запрос ИК-протокола используемого для передачи данных. uint8_t k = ir.getProtocol_RX(); // Запрос ИК-протокола используемого для приёма данных.
Функция seeProtocol_RX();
- Назначение: Перевод ИК приёмника в режим определения протокола получаемых данных.
- Синтаксис: seeProtocol_RX();
- Параметры: Нет
- Возвращаемое значение: bool - результат перевода в режим определения (true или false).
- Примечание:
- После обращения к данной функции, ИК приёмник сбросит протокол используемый для приёма данных, самостоятельно определит ИК протокол первых полученных данных и установит его для дальнейшего приёма данных.
- ИК приёмник может определить протокол только если получит пакет данных и пакет повтора. Значит для определения протокола с ИК пульта ДУ необходимо нажать и удерживать любую кнопку пульта не менее 0,3 - 0,5 секунд.
- Узнать протокол определённый приёмником можно при помощи функции getProtocol_RX().
- Пример:
ir.seeProtocol_RX(); // Переводим ИК приёмник в режим определения протокола получаемых данных.
while( ir.getProtocol_RX()==IR_UNDEFINED ){;} // Ждём пока запрос протокола используемого для приёма данных не станет отличным от значения IR_UNDEFINED.
ir.setProtocol( ir.getProtocol_RX(), ir.modeRC6 ); // Указываем использовать обнаруженный ИК протокол для приёма и передачи данных.
Функция setInterval();
- Назначение: Установка интервала между пакетами повторов. Используется ИК передатчиком при постоянной отправке данных и ИК приёмником для ожидания пакетов повторов.
- Синтаксис: setInterval( ИНТЕРВАЛ [, ФЛАГ ] );
- Параметры:
- uint8_t ИНТЕРВАЛ - значение от 24 до 255 определяющее время в миллисекундах между пакетами повторов. Если в качестве интервала указать 0, то модуль будет использовать интервал между пакетами повторов в соответствии с используемым ИК протоколом.
- bool ФЛАГ - разрешающий ИК передатчику хаотично менять интервал между пакетами повторов в диапазоне ±50% от заданного, что позволит передавать данные по ИК-каналу от нескольких модулей, в одном направлении, одновременно. Если ФЛАГ не указан, то интервал меняться не будет.
- Возвращаемое значение: bool - результат применения нового интервала (true или false).
- Примечание:
- Указанный ИНТЕРВАЛ между пакетами повторов используется ИК передатчиком для автоматической отправки пакетов (см. функцию autoSend()).
- Указанный ИНТЕРВАЛ между пакетами повторов используется ИК приёмником для отличия нажатия кнопки пульта от её удержания.
- Модуль позволяет указать разные интервалы для приёмника и передатчика, для этого в библиотеке есть две функции:
- setInterval_TX( ИНТЕРВАЛ [, ФЛАГ ] ); - установка интервала для передатчика.
- setInterval_RX( ИНТЕРВАЛ ); - установка интервала ожидания для приёмника.
- Пример:
ir.setInterval(100); // Указываем модулю использовать интервал в 100 мс между пакетами повторов. ir.setInterval(100,true); // Указываем модулю использовать интервал в 100 мс между пакетами повторов, а при передаче пакетов менять интервал в диапазоне ±50% от заданного.
Функция send();
- Назначение: Однократная отправка данных по ИК-каналу.
- Синтаксис: send( АДРЕС, КОМАНДА );
- Синтаксис: send( КОД );
- Параметры:
- uint8_t АДРЕС - значение от 0 до 255 определяющее адрес ИК устройства для которого предназначена команда:
- uint8_t КОМАНДА - значение от 0 до 255 определяющее команду для ИК устройства.
- uint16_t КОД - двухбайтное число в котором старший байт является адресом ИК устройства, а младший - командой для ИК устройства.
- Возвращаемое значение: bool - результат отправки данных модулю (true или false).
- Примечание:
- Функция передаёт данные модулю, но не ждёт пока ИК передатчик модуля отправит данные по ИК-каналу. Если после передачи данных модулю требуется дождаться завершения их отправки по ИК-каналу, воспользуйтесь функцией wait().
- Функция указывает модулю отправить данные однократно, одним пакетом, без отправки пакетов повторов. Аналогичным образом данные отправляет ИК пульт ДУ при однократном и очень кратковременном нажатии на его кнопку.
- При отправке данных от лица автомобиля трассы, в качестве адреса указывается значение MODUL_CAR, а в качестве команды, любое число от 0 до 255. Вы сами можете придумать какая команда что значит (внимание, уступи дорогу, остановись, уступаю дорогу, поворачиваю влево, еду прямо, еду быстро, еду медленно и т.д.).
- Для совместимости данной библиотеки с библиотекой iarduino_IR можно воспользоваться функцией send32( КОД ) которая в качестве параметра принимает 4 байтное число.
- Пример:
ir.send(0x12, 0x34); // Однократно отправить по ИК-каналу адрес 0x12 и команду 0x34. ir.send(MODUL_CAR, 0x01); // Однократно отправить по ИК-каналу команду 0x01 от автомобиля трассы. ir.send(0x1234); // Однократно отправить по ИК-каналу адрес 0x12 и команду 0x34. ir.send32(0x48B72CD3); // Однократно отправить по ИК-каналу адрес 0x12 и команду 0x34 в кодировке IR_NEC.
Функция wait();
- Назначение: Ожидание завершения однократной отправки данных по ИК-каналу.
- Синтаксис: wait();
- Параметры: Нет.
- Возвращаемое значение: Нет.
- Примечание:
- Функция ждёт завершение однократной отправки данных, которая была запущена функцией send() или send32().
- Функция приостанавливает выполнение скетча, постоянно опрашивая модуль по шине I2C, до тех пор пока ИК-передача не будет завершена, но не дольше 500 мс.
- Время отправки одного пакета данных зависит от используемого ИК протокола (см. функцию setProtocol()).
- Пример:
ir.send(0x12, 0x34); // Однократно отправить по ИК-каналу адрес 0x12 и команду 0x34. ir.wait(); // Дождаться завершения отправки данных по ИК-каналу. // Эта строка будет выполнена только после отправки данных по ИК-каналу.
Функция autoSend();
- Назначение: Автоматическая отправка пакетов данных по ИК-каналу.
- Синтаксис: autoSend( АДРЕС, КОМАНДА );
- Синтаксис: autoSend( КОД );
- Параметры:
- uint8_t АДРЕС - значение от 0 до 255 определяющее адрес ИК устройства для которого предназначена команда:
- uint8_t КОМАНДА - значение от 0 до 255 определяющее команду для ИК устройства.
- uint16_t КОД - двухбайтное число в котором старший байт является адресом ИК устройства, а младший - командой для ИК устройства.
- Возвращаемое значение: bool - результат отправки данных модулю (true или false).
- Примечание:
- Функция передаёт данные модулю, для их постоянной отправки по ИК-каналу. Модуль отправляет пакет данных, а за ним постоянно и самостоятельно отправляет пакеты повторов с заранее заданным функцией setInterval() или setInterval_TX() интервалом. Аналогичным образом данные отправляет ИК пульт ДУ при удержании его кнопки.
- Остановить отправку пакетов повторов можно при помощи функции autoStop().
- При отправке данных от лица автомобиля трассы, в качестве адреса указывается значение MODUL_CAR, а в качестве команды, любое число от 0 до 255. Вы сами можете придумать какая команда что значит (внимание, уступи дорогу, остановись, уступаю дорогу, поворачиваю влево, еду прямо, еду быстро, еду медленно и т.д.).
- Для совместимости данной библиотеки с библиотекой iarduino_IR можно воспользоваться функцией autoSend32( КОД ) которая в качестве параметра принимает 4 байтное число.
- Пример:
ir.autoSend(0x12, 0x34); // Постоянно отправлять по ИК-каналу адрес 0x12 и команду 0x34. ir.autoSend(MODUL_CAR, 0x01); // Постоянно отправлять по ИК-каналу команду 0x01 от автомобиля трассы. ir.autoSend(0x1234); // Постоянно отправлять по ИК-каналу адрес 0x12 и команду 0x34. ir.autoSend32(0x48B72CD3); // Постоянно отправлять по ИК-каналу адрес 0x12 и команду 0x34 в кодировке IR_NEC.
Функция autoStop();
- Назначение: Остановка автоматической отправки пакетов по ИК-каналу.
- Синтаксис: autoStop();
- Параметры: Нет.
- Возвращаемое значение: bool - результат остановки пакетов (true или false).
- Примечание:
- Функция останавливает процесс автоматической отправки данных по ИК-каналу, запущенный функцией autoSend() или autoSend32().
- Пример:
ir.autoSend(0x12, 0x34); // Постоянно отправлять по ИК-каналу адрес 0x12 и команду 0x34. delay(1000); // Ждём 1 секунду. ir.autoStop(); // Остановить процесс автоматической отправки данных по ИК-каналу.
Функция check();
- Назначение: Проверка наличия принятых по ИК-каналу данных.
- Синтаксис: check( [ФЛАГ] );
- Параметры:
- bool ФЛАГ разрешающий реагировать на пакеты повтора (true или false).
- Возвращаемое значение: bool - наличие принятых данных (true или false).
- Примечание:
- Если функция вызвана с параметром true, то она будет реагировать и на первый пакет данных и на все пакеты повторов (на нажатие и удержание кнопок ИК пульта ДУ).
- Если функция вызвана с параметром false или без параметра, то она будет реагировать только на первый принятый пакет данных (только на нажатие кнопок ИК пульта ДУ).
- Функция не реагирует на нулевые данные (если адрес=0 и команда=0).
- Если функция вернула значение true, значит принятые данные можно прочитать из переменных:
- uint8_t address - переменная хранит принятый байт адреса ИК-устройства.
- uint8_t command - переменная хранит принятый байт команды ИК-устройства.
- uint16_t code - переменная хранит двухбайтное число, старший байт которого является адресом ИК-устройства, а младший байт командой ИК-устройства.
- bool key_press - флаг указывающий на то, что функция check() среагировала на первый пакет данных, а не на пакет повтора (кнопка пульта нажимается а не удерживается).
- uint32_t code32 - переменная для совместимости с библиотекой iarduino_IR хранит 4 байтное число состоящее из length бит данных.
- uint8_t length - переменная для совместимости с библиотекой iarduino_IR хранит количество информационных бит данных в переменной code32.
- uint8_t modeRC6 - переменная хранит число от 0 до 7 которое определяет режим используемый протоколом IR_RC6
- При получении данных от модулей линейки «Дорожное движение» доступны данные дополнительных переменных:
- uint8_t device - переменная указывает на наличие данных от модуля линейки «Дорожное движение», может принимать следующие значения:
- 0 - данные приняты не от модуля линейки «Дорожное движение».
- MODUL_TLIGHT - приняты данные от модуля светофор.
- MODUL_SIGN - приняты данные от модуля знак.
- MODUL_CAR - приняты данные от модуля машина.
- Информацию переданную автомобилем можно получить из переменной:
- uint8_t command - команда переданная автомобилем (0-255). Вы сами определяете какая команда что значит (внимание, уступи дорогу, остановись, уступаю дорогу, поворачиваю влево, еду прямо, еду быстро, еду медленно и т.д.).
- Информацию о состоянии светофора можно получить из переменных:
- bool track_F - флаг указывающий о наличии дороги прямо (0-нет, 1-есть).
- bool track_R - флаг указывающий о наличии поворота вправо (0-нет, 1-есть).
- bool track_L - флаг указывающий о наличии поворота влево (0-нет, 1-есть).
- uint8_t forvard - разрешает движения прямо (0-нельзя, 1-можно, 2-если нет помех).
- uint8_t right - разрешает движения вправо (0-нельзя, 1-можно, 2-если нет помех).
- uint8_t left - разрешает движения влево (0-нельзя, 1-можно, 2-если нет помех).
- uint8_t gate - флаг состояния шлагбаума (0-закрыт, 1-открыт).
- Биты состояний всех цветов светофора и состояния шлагбаума можно прочитать из байта команды ИК-устройства command.
- Если переменные forvard, right или left имеют значение 2 (если нет помех), значит светофор "сломан" (постоянно мигает жёлтый) или разрешается поворот налево по основному зелёному сигналу светофора у которого нет секции поворота налево.
- Информацию о знаке дорожного движения можно получить из переменных:
- char* sign_str - строка хранящая обозначение знака ПДД ("1.1" ... "7.63.15").
- uint16_t sign_int - переменная хранящая обозначение знака ПДД (10100...76315).
- uint8_t sign[3] - массив хранящий группу, номер и пункт знака ПДД ({1,1,0}...{7,63,15}).
- uint8_t sign_tab - переменная хранящая назначение таблички находящейся под знаком:
- 0 - под знаком нет таблички уточняющей или ограничивающей его действие
- SIGN_CAR_TRUCK - действие знака распространяется только на грузовые ам.
- SIGN_CAR_LIGHT - действие знака распространяется только на легковые ам.
- SIGN_DISTANCE_050 - расстояние до объекта или зона действия знака = 50 м.
- SIGN_DISTANCE_100 - расстояние до объекта или зона действия знака = 100 м.
- SIGN_DISTANCE_150 - расстояние до объекта или зона действия знака = 150 м.
- SIGN_DISTANCE_200 - расстояние до объекта или зона действия знака = 200 м.
- SIGN_DISTANCE_250 - расстояние до объекта или зона действия знака = 250 м.
- Если приняты данные от модуля машина, значит она появилась в зоне видимости и может стать помехой.
- Пример:
if( ir.check(true) ){ // Если ИК приёмник получил пакет данных или пакет повтора.
Serial.print("Адрес ="); Serial.println(ir.address);
Serial.print("Команда="); Serial.println(ir.command);
Serial.print("Кнопка ");
if(ir.key_press){ Serial.println("нажимается"); } // Получен пакет данных.
else{ Serial.println("удерживается");} // Получен пакет повтора.
Serial.println("----------------");
}
Адреса передаваемые по ИК-каналу зарезервированные для линейки «Дорожное движение»:
- 0x01 - «Автомобиль».
- 0x04 ... 0x1F - «Светофор».
- 0x20 ... 0xFF - «Знак».
- 0x02 ... 0x03 - свободные адреса.
Ссылки:
- Модуль - ИК-приемник/передатчик, FLASH-I2C.
- Wiki - ИК-приемник/передатчик, FLASH-I2C - Datasheet.
- Модули линейки «Дорожное движение».
- Роботраффик - система дорожного движения.
- Библиотека iarduino_I2C_IR.
- Библиотека iarduino_I2C_Software.
- Wiki - Расширенные возможности библиотек iarduino для шины I2C.
- Wiki - Установка библиотек в Arduino IDE.
- Wiki - Программная установка адресов модулей FLASH-I2C.

Обсуждение