Энкодер (Trema-модуль)
")
Общие сведения:
Trema-модуль Энкодер - это датчик угла поворота, позволяющий дискретно (прерывисто) определять угол поворота вала и нажатие на него. Основным элементом данного модуля является инкрементальный (пошаговый) энкодер с тактовой (тактильной) кнопкой.
Видео:
Спецификация:
- Входное напряжение питания модуля: 5 В
- Ток потребляемый модулем: < 3 мА
- Допустимый ток на выходах модуля: < 10 мА
- Сопротивление контактов: < 3 Ом
- Количество циклов вращения: < 30'000
- Количество циклов переключения: < 20'000
- Рабочая температура: -30 ... 70 °C
- Длина вала: 12 мм
- Диаметр вала: Ø6 мм
- Габариты: 30x30x38 (с учётом колодки выводов)
Все модули линейки "Trema" выполнены в одном формате

Подключение:
- Выводы A и B модуля являются выходами энкодера
- Вывод S (Signal) модуля является выходом тактовой кнопки
- Выводы V (Vcc) и G (GND) модуля являются входом питания
При использовании библиотеки iarduino_Encoder_tmr, все выходы модуля можно подключать к любым выводам Arduino, а к одной Arduino можно подключить до 8 модулей.
Модуль удобно подключать 2 способами, в зависимости от ситуации:
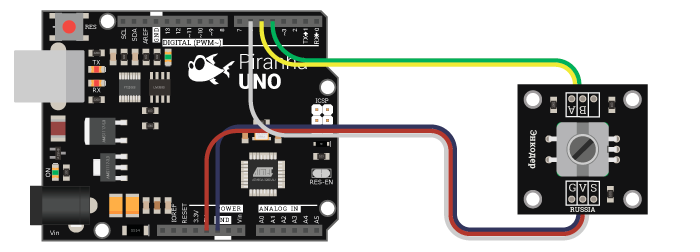
Способ - 1 : Используя проводной шлейф и Piranha UNO
Используя провода «Папа — Мама», подключаем напрямую к контроллеру Piranha UNO.
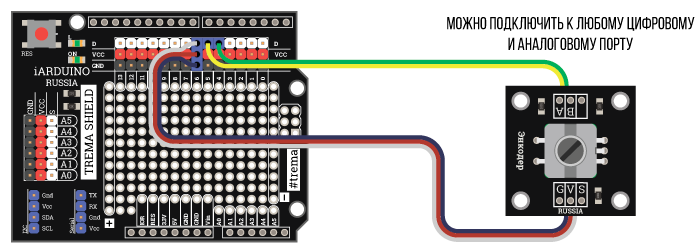
Способ - 2 : Используя проводной шлейф и Shield
Используя 3-х проводной шлейф, к Trema Shield, Trema-Power Shield, Motor Shield, Trema Shield NANO и тд.
Питание:
Входное напряжение 5 В постоянного тока, подаётся на выводы V (Vcc) и G (GND) модуля.
Подробнее о модуле:
Полный оборот инкрементального энкодера (360°) разбит на дискретные участки (шаги), при прохождении которых энкодер формирует импульсы на своих выходах. Подсчитав количество импульсов, можно определить угол поворота относительно начального положения вала. У инкрементального энкодера имеется два выхода (третий вывод является общим входом, с которым импульсно соединяются выходы) и на обоих выходах формируется одинаковое количество импульсов, но в зависимости от направления поворота, импульсы на одном выводе будут опережать или отставать от импульсов на другом выводе (код Грея). Таким образом можно определить не только угол, но и направление поворота.
Полный оборот вала Trema-энкодера разбит на 20 дискретных участков по 18° на каждый, значит при полном обороте вала энкодера, на выходе каждого вывода модуля сформируется по 20 импульсов.
При неподвижном и не нажатом вале энкодера, на выходах модуля A и B присутствуют уровни логической «1», а на выходе S (Signal) уровень логического «0». При вращении вала энкодера на выходах A и B формируются отрицательные импульсы, а при нажатии на вал, на выходе S (Signal) устанавливается уровень логической «1».
Для работы с модулем предлагаем воспользоваться библиотекой iarduino_Encoder_tmr, которая позволяет работать с несколькими энкодерами используя второй аппаратный таймер. Библиотека постоянно считывает уровни сигналов на выходах A и B модулей, фиксируя наличие поворота и его направление. Получить состояние энкодера можно вызвав функцию библиотеки read, которая вернёт одно из трёх состояний: encLEFT(зафиксирован поворот влево), encRIGHT (зафиксирован поворот вправо), или false (повороты не зафиксированы).
Подробнее про установку библиотеки читайте в нашей инструкции..
Примеры:
Пример 1:
int i=enc.read(); // Читаем состояние энкодера в переменную i
if(i){ // Если энкодер зафиксировал поворот (i!=false), то ...
if( i==encLEFT ){Serial.println("<");} // Если энкодер зафиксировал поворот влево, выводим символ <
if( i==encRIGHT ){Serial.println(">");} // Если энкодер зафиксировал поворот вправо, выводим символ >
}Пример 2:
i = i + enc.read(); // Если энкодер зафиксирует поворот, то значение переменной i изменится:
// если был поворот влево, то переменная i уменьшится на 1, а если был поворот вправо, то увеличится на 1.
// Единственную строку данного примера можно записать еще короче: i+=enc.read();Вывод состояния энкодера:
#include <iarduino_Encoder_tmr.h> // Подключаем библиотеку iarduino_Encoder_tmr для работы с энкодерами через аппаратный таймер
iarduino_Encoder_tmr enc(11,12); // Объявляем объект enc для работы с энкодером указывая (№ вывода A, № вывода B)
// Если при объявлении объектов перепутать выводы, то поворот влево будет расценен как поворот вправо и наоборот
void setup(){
Serial.begin(9600); // Инициируем передачу данных в монитор последовательного порта
enc.begin(); // Инициируем работу с энкодером
}
void loop(){
int i=enc.read(); // Читаем состояние энкодера в переменную i
if(i){ // Если энкодер зафиксировал поворот, то ...
if(i==encLEFT ){Serial.println("<");} // Если энкодер зафиксировал поворот влево, выводим символ <
if(i==encRIGHT){Serial.println(">");} // Если энкодер зафиксировал поворот вправо, выводим символ >
}
}При каждом повороте энкодера, в мониторе будет отображаться его направление.
Вывод счетчика энкодера:
#include <iarduino_Encoder_tmr.h> // Подключаем библиотеку iarduino_Encoder_tmr для работы с энкодерами через аппаратный таймер
iarduino_Encoder_tmr enc(11,12); // Объявляем объект enc для работы с энкодером указывая (№ вывода A, № вывода B)
int n = 0; // Определяем переменную n для подсчёта дискретных поворотов энкодера
void setup(){
Serial.begin(9600); // Инициируем передачу данных в монитор последовательного порта
enc.begin(); // Инициируем работу с энкодером
}
void loop(){
int i=enc.read(); // Читаем состояние энкодера в переменную i
if(i){ // Если энкодер зафиксировал поворот, то ...
n=n+i; /* n+=i*/ // Меняем значение счётчика n, т.к. в переменной i находится -1 (при повороте влево), или +1 (при повороте вправо).
Serial.println(n); // Выводим значение счётчика n
}
}При повороте энкодера в мониторе будет отображаться значение счётчика, при повороте влево счётчик будет уменьшаться, а при повороте вправо - увеличиваться.
Описание основных функций библиотеки:
Подключение библиотеки:
#include <iarduino_Encoder_tmr.h> // Подключаем библиотеку iarduino_Encoder_tmr для работы с энкодерами через аппаратный таймер
iarduino_Encoder_tmr enc(№_вывода_A, №_вывода_B); // Объявляем объект enc для работы с энкодером (можно использовать любые выводы Arduino)Можно объявить несколько объектов, тогда каждый объект будет работать со своим энкодером.
Имена объектов должны отличаться. Библиотека позволяет подключить до 8 энкодеров.
Функция begin();
- Назначение: Инициализация работы с энкодером.
- Синтаксис: begin();
- Параметры: Нет.
- Возвращаемые значения: Нет.
- Примечание: Вызывается 1 раз в коде setup.
- Пример:
void setup(){
enc.begin(); // Инициируем работу с энкодером
}Функция read();
- Назначение: Чтение состояния энкодера.
- Синтаксис: read();
- Параметры: Нет.
- Возвращаемые значения: int8_t
- encLEFT - зафиксирован поворот влево.
- encRIGHT - зафиксирован поворот вправо.
- false - повороты не зафиксированы.
- Примечание:
- Если повернуть энкодер и вызвать функцию read(), она вернёт зафиксированное состояние, а на последующие вызовы функция будет возвращать false до тех пор, пока опять не будет зафиксирован поворот.
- Если повернуть энкодер, а функцию read() вызвать через пол года, она вернёт зафиксированное состояние.
- Если повернуть энкодер в разные стороны, а потом вызвать функцию read(), она вернёт последнее зафиксированное состояние.
- Возвращаемые значения можно использовать для увеличения или уменьшения Ваших переменных:
encLEFT = -1, encRIGHT = 1, false = 0.
Применение:
- Роботостроение
- Бытовая техника (стиральные машины, микроволновые печи и т.д.)
- Аудиосистемы