

")
Общие сведения:
Trema-модуль Потенциометр отлично подойдет для управления различными проектами. Исполнен в линейке Trema-модулей, благодаря этому вам не придется ничего паять и собирать на макетной плате.
Удобно использовать для настройки скорости вращения двигателя, угла поворота сервопривода, яркости светодиода и многого другого.
Если вы хотите управлять потенциометром линейным движением, а не вращательным, то можете воспользоваться аналогичным вариантом Trema-модуль ползунковый потенциометр.
Видео:
Спецификация:
- Сопротивление: 10 кОм
- Тип потенциометра: линейный
- Угол поворота движка: 300°
Все модули линейки "Trema" выполнены в одном формате

Подключение:
В комплекте имеется кабель для быстрого и удобного подключения к Trema Shield.
На выходе из датчика мы имеем аналоговый сигнал
Датчик подключается к любому из аналоговых входов.
Модуль удобно подключать 3 способами, в зависимости от ситуации:
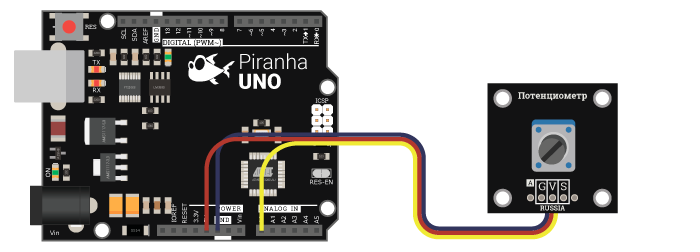
Способ - 1 : Используя проводной шлейф и Piranha UNO
Используя провода «Папа — Мама», подключаем напрямую к контроллеру Piranha UNO
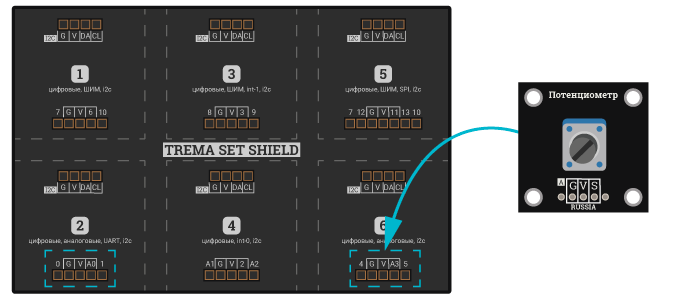
Способ - 2 : Используя Trema Set Shield
Модуль можно подключить к любому из аналоговых входов Trema Set Shield.
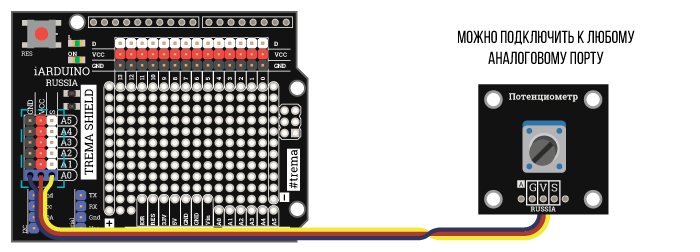
Способ - 3 : Используя проводной шлейф и Shield
Используя 3-х проводной шлейф, к Trema Shield, Trema-Power Shield, Motor Shield, Trema Shield NANO и тд.
Примеры:
Регулировка потенциометром угла поворота сервопривода.
#include// Подключаем библиотеку для работы с сервоприводом Servo servo1; // Объявляем переменную servo типа "servo1" int8_t potencPin = A0; // Указываем номер вывода, к которому подключен потенциометр int16_t Volume = 0; // Определяем переменную для значений, считанных с потенциометра uint8_t konvert = 0; // Определяем переменную для значений, которые будут передаваться как ШИМ-сигнал void setup() { servo1.attach(3); // привязываем сервопривод к выводу 3 } void loop() { Volume = analogRead(potencPin); // Считываем значения с потенциометра konvert = map(Volume, 0, 1023, 0, 180); // Преобразуем полученный интервал значений с потенциометра в интервал для ШИМ-сигнала servo1.write(konvert); // Подаём на вывод сервопривода значение угла поворота }

Обсуждение