

")
")
Общие сведения:
Trema-модуль Адаптер драйвера шагового двигателя — используется для подключения драйвера шагового двигателя ( DRV8825 или A4988 ) и управления шаговыми двигателями(ШД).
Видео:
Спецификация:
- Питание логики: 3.3 - 5В;
- Питание ШД: до 30В;
- Настройка размера шага переключателями на плате;
- Габариты: 30x30 мм.
Все модули линейки "Trema" выполнены в одном формате

Подключение:
Trema-модуль Адаптер драйвера шагового двигателя входит в линейку Trema-модулей, что позволяет подключить его к Arduino через Trema Shield по одному 3-проводному и двум 1-проводным шлейфам (идёт в комплекте) без пайки, без дополнительных проводов и переходников, его можно подключать к цифровому выводу Arduino.
Адаптер драйвера шагового двигателя подключается к 3 любым цифровым выводам Arduino.
| Выводы адаптера | Значение | Выводы Arduino |
|---|---|---|
| E (Enable) | Разрешение чипу начать работу. Инверсный вывод (0 - разрешить, 1 - запретить); | Любой цифровой вывод |
| G (GND) | Земля | GND |
| V (VCC) | Питание логики | 3V3/5V |
| S (STEP) | Подача импульсного сигнала шаговому двигателю для поворота (1 импульс - 1 шаг) | Любой цифровой вывод |
| D (DIR) | Указание направления вращения шагового двигателя (0 или 1) | Любой цифровой вывод |
Модуль удобно подключать 3 способами, в зависимости от ситуации:
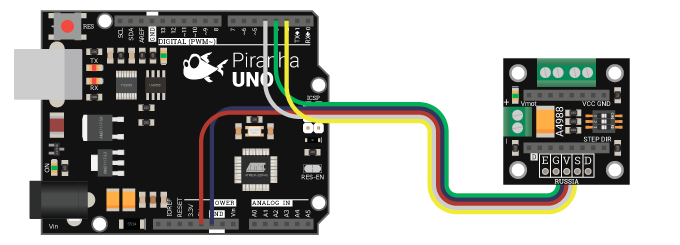
Способ - 1 : Используя проводной шлейф и Piranha UNO
Используя провода «Папа — Мама», подключаем напрямую к контроллеру Piranha UNO
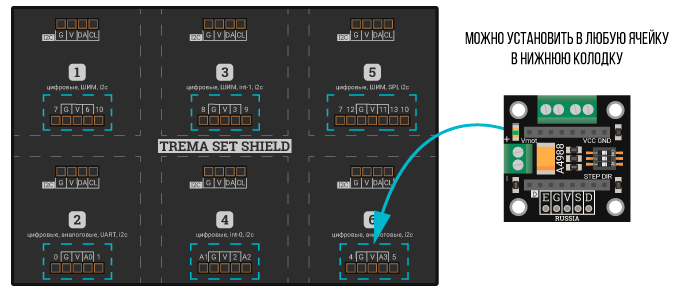
Способ - 2 : Используя Trema Set Shield
Модуль можно подключить к любому из цифровых входов Trema Set Shield.
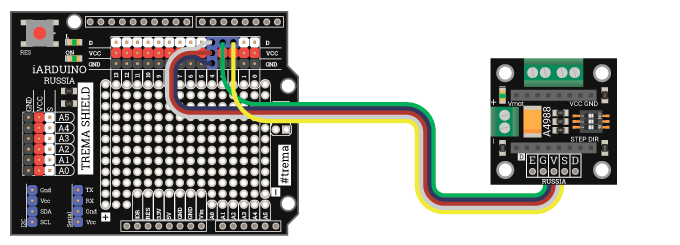
Способ - 3 : Используя проводной шлейф и Shield
Используя 5-проводной шлейф, к Trema Shield, Trema-Power Shield, Motor Shield, Trema Shield NANO и тд.
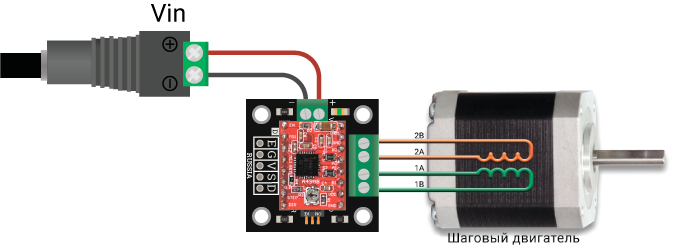
Подключение шагового двигателя к адаптеру:
После установки драйвера мотора в адаптер подключите питание ШД и сам ШД согласно следующей схеме:
Настройка размера шага двигателя:
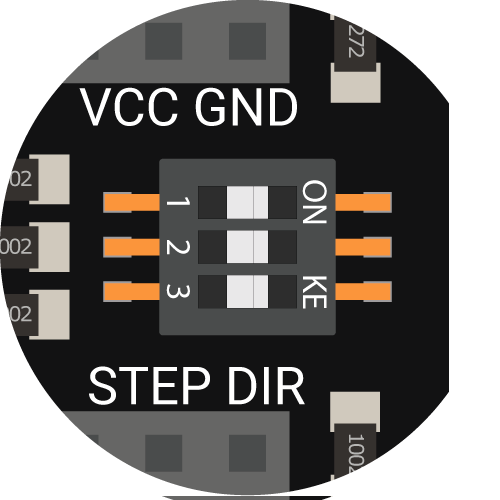
На плате имеется блок перемычек для регулировки размера шага двигателя.
Для каждого драйвера таблица шагов будет своя, в зависимости от модели драйвера.
Ниже приведены таблицы настройки размера шага для драйверов DRV8825 и A4988.
Драйвер A4988:
| Размер шага | MS-3 | MS-2 | MS-1 |
|---|---|---|---|
| Полный шаг | 0 | 0 | 0 |
| 1/2 шага | 0 | 0 | 1 |
| 1/4 шага | 0 | 1 | 0 |
| 1/8 шага | 0 | 1 | 1 |
| 1/16 шага | 1 | 1 | 1 |
Драйвер DRV8825:
| Размер шага | MS-3 | MS-2 | MS-1 |
|---|---|---|---|
| Полный шаг | 0 | 0 | 0 |
| 1/2 шага | 0 | 0 | 1 |
| 1/4 шага | 0 | 1 | 0 |
| 1/8 шага | 0 | 1 | 1 |
| 1/16 шага | 1 | 0 | 0 |
| 1/32 шага | 1 | 0 | 1 |
| 1/32 шага | 1 | 1 | 0 |
| 1/32 шага | 1 | 1 | 1 |
Питание:
Адаптер драйвера шагового двигателя имеет колодку для подключения внешнего питания (для шагового двигателя) согласно указанной полярности, а так же выводы G и V для питания логики, которые подключаются соответственно к выводам GND и 5V Arduino.
Примеры:
Управление вращением шагового двигателя с помощью потенциометра.
Для управления шаговым двигателем (ШД) понадобится драйвер мотора. В данном случае используется драйвер мотора A4988.
Устанавливаем его в адаптер, а после этого подключаем адаптер и потенциометр к Arduino.
Адаптер драйвера шагового двигателя:
- E - цифровой вывод 7;
- G - GND;
- V - 5V;
- S - цифровой вывод 6;
- D - цифровой вывод 10;
Потенциометр:
- G - GND;
- V - 5V;
- S - A0;
const int8_t Step = 6; // импульсы вращения двигателя
const int8_t Dir = 10; // направление вращения двигателя
const int8_t Enable = 7; // разрешение работы чипу драйвера ШД
const int8_t Potenc = A0; // потенциометр
int16_t move_delay; // временная задержка между шагами мотора
int16_t val_potenc; // Переменная для хранения значения потенциометра
void setup() {
pinMode (Potenc, INPUT); // Настраиваем вывод Potenc на работу в режиме входа
pinMode(Step, OUTPUT); // Настраиваем вывод Step на работу в режиме выхода
pinMode(Dir, OUTPUT); // Настраиваем вывод Dir на работу в режиме выхода
pinMode(Enable, OUTPUT); // Настраиваем вывод Enable на работу в режиме выхода
digitalWrite(Enable, LOW); // Устанавливаем состояние на выходе равным 0 (LOW)
}
void loop() {
val_potenc = analogRead(Potenc); // считываем значение потенциометра в переменную val_potenc
if (val_potenc < 470 ) { // Если значение меньше заданного, то
val_potenc = 470 - val_potenc; // определяем значение val_potenc
digitalWrite(Dir, LOW); // Устанавливаем направление вращения (против часовой стрелки)
} else
if (val_potenc > 554) { // Если значение больше заданного, то
val_potenc = val_potenc - 554; // определяем значение val_potenc
digitalWrite(Dir, HIGH); // Устанавливаем направление вращения (по часовой стрелке)
} else {
val_potenc = 0; // Если значение не удовлетворяет ни одному условию, то обнуляем значение переменной val_potenc
}
if (val_potenc) { // Если значение val_potenc отлично от 0, то
move_delay = map(val_potenc, 1, 470, 5000, 500); // переносим диапазон полученных значений с потенциометра в диапазон значений временной задержки между шагами двигателя
digitalWrite(Step, HIGH); delayMicroseconds(move_delay); // Подаём сигнал на вывод Step в течении времени move_delay;
digitalWrite(Step, LOW); delayMicroseconds(move_delay); // Снимаем сигнал с вывода Step и ждём время move_delay;
}
}
После загрузки скетча и подключения питания к двигателю, обратите внимание на потенциометр. При плавном повороте ручки потенциометра вправо двигатель будет плавно набирать скорость и вращаться по-часовой стрелке, а при плавном повороте ручки влево двигатель будет плавно набирать скорость и вращаться против часовой стрелки.
Управление вращением 2 шаговых двигателей с помощью джойстика.
Для управления шаговым двигателем (ШД) понадобится драйвер мотора. В данном случае используется драйвер мотора A4988.
Устанавливаем его в адаптер, а после этого подключаем адаптер и джойстик к Arduino:
Адаптер драйвера шагового двигателя:
- E - цифровой вывод 7;
- G - GND;
- V - 5V;
- S - цифровой вывод 6;
- D - цифровой вывод 10;
Джойстик:
- X - A2;
- K - не подключен;
- V - 5V;
- G - GND;
- Y - A1;
const int8_t Step1 = 6; // импульсы вращения двигателя оси У
const int8_t Step2 = 11; // импульсы вращения двигателя оси Х
const int8_t Dir1 = 10; // направление вращения двигателя оси У
const int8_t Dir2 = 13; // направление вращения двигателя оси Х
const int8_t Enable1 = 7; // разрешение работы чипу драйвера ШД оси У
const int8_t Enable2 = 12; // разрешение работы чипу драйвера ШД оси Х
const int8_t Potenc1 = A1; // потенциометр оси У
const int8_t Potenc2 = A2; // потенциометр оси Х
int16_t move_delay1; // временная задержка между шагами мотора оси У
int16_t move_delay2; // временная задержка между шагами мотора оси Х
int16_t val_potenc1; // Переменная для хранения значения потенциометра оси У
int16_t val_potenc2; // Переменная для хранения значения потенциометра оси Х
void setup() {
pinMode (Potenc1, INPUT); // Настраиваем вывод Potenc1 на работу в режиме входа
pinMode (Potenc2, INPUT); // Настраиваем вывод Potenc2 на работу в режиме входа
pinMode(Step1, OUTPUT); // Настраиваем вывод Step1 на работу в режиме выхода
pinMode(Step2, OUTPUT); // Настраиваем вывод Step2 на работу в режиме выхода
pinMode(Dir1, OUTPUT); // Настраиваем вывод Dir1 на работу в режиме выхода
pinMode(Dir2, OUTPUT); // Настраиваем вывод Dir2 на работу в режиме выхода
pinMode(Enable1, OUTPUT); // Настраиваем вывод Enable1 на работу в режиме выхода
pinMode(Enable2, OUTPUT); // Настраиваем вывод Enable2 на работу в режиме выхода
digitalWrite(Enable1, LOW); // Устанавливаем состояние на выходе Enable1 равным 0 (LOW)
digitalWrite(Enable2, LOW); // Устанавливаем состояние на выходе Enable2 равным 0 (LOW)
}
void loop() {
val_potenc1 = analogRead(Potenc1); // считываем значение потенциометра оси У в переменную val_potenc1
if (val_potenc1 < 470 ) { // Если значение меньше заданного, то
val_potenc1 = 470 - val_potenc1; // инвертируем значение val_potenc1, чтобы оно принимало значения от 0 до 469
digitalWrite(Dir1, LOW); // Устанавливаем направление вращения (против часовой стрелки)
} else //
if (val_potenc1 > 554) { // Если значение больше заданного, то
val_potenc1 = val_potenc1 - 554; // инвертируем значение val_potenc1, чтобы оно принимало значения от 0 до 469
digitalWrite(Dir1, HIGH); // Устанавливаем направление вращения (по часовой стрелке)
} else { // Если значение не удовлетворяет ни одному условию, то
val_potenc1 = 0; // обнуляем значение переменной val_potenc1
}
val_potenc2 = analogRead(Potenc2); // считываем значение потенциометра оси Х в переменную val_potenc2
if (val_potenc2 < 470 ) { // Если значение меньше заданного, то
val_potenc2 = 470 - val_potenc2; // инвертируем значение val_potenc2, чтобы оно принимало значения от 0 до 469
digitalWrite(Dir2, LOW); // Устанавливаем направление вращения (против часовой стрелки)
} else //
if (val_potenc2 > 554) { // Если значение больше заданного, то
val_potenc2 = val_potenc2 - 554; // инвертируем значение val_potenc2, чтобы оно принимало значения от 0 до 469
digitalWrite(Dir2, HIGH); // Устанавливаем направление вращения (по часовой стрелке)
} else { // Если значение не удовлетворяет ни одному условию, то
val_potenc2 = 0; // обнуляем значение переменной val_potenc2
}
if (val_potenc1) { // Если значение val_potenc1 отлично от 0, то
move_delay1 = map(val_potenc1, 1, 470, 5000, 500); // переносим диапазон полученных значений с потенциометра оси У в диапазон значений временной задержки между шагами двигателя
digitalWrite(Step1, HIGH); delayMicroseconds(move_delay1); // Подаём сигнал на вывод Step1 в течении времени move_delay1;
digitalWrite(Step1, LOW); delayMicroseconds(move_delay1); // Снимаем сигнал с вывода Step1 и ждём время move_delay1;
}
if (val_potenc2) { // Если значение val_potenc2 отлично от 0, то
move_delay2 = map(val_potenc2, 1, 470, 5000, 1000); // переносим диапазон полученных значений с потенциометра оси Х в диапазон значений временной задержки между шагами двигателя
digitalWrite(Step2, HIGH); delayMicroseconds(move_delay2); // Подаём сигнал на вывод Step2 в течении времени move_delay2;
digitalWrite(Step2, LOW); delayMicroseconds(move_delay2); // Снимаем сигнал с вывода Step2 и ждём время move_delay2;
}
}
После загрузки скетча и подключения питания к двигателю, обратите внимание на джойстик. При повороте ручки джойстика вправо/вверх двигатели оси Х/У будет плавно набирать скорость и вращаться по-часовой стрелке, а при плавном повороте ручки влево/вниз двигатели будут плавно набирать скорость и вращаться против часовой стрелки.
Применение:
- Станки резки/гравировки/3D-печати;

Обсуждение